
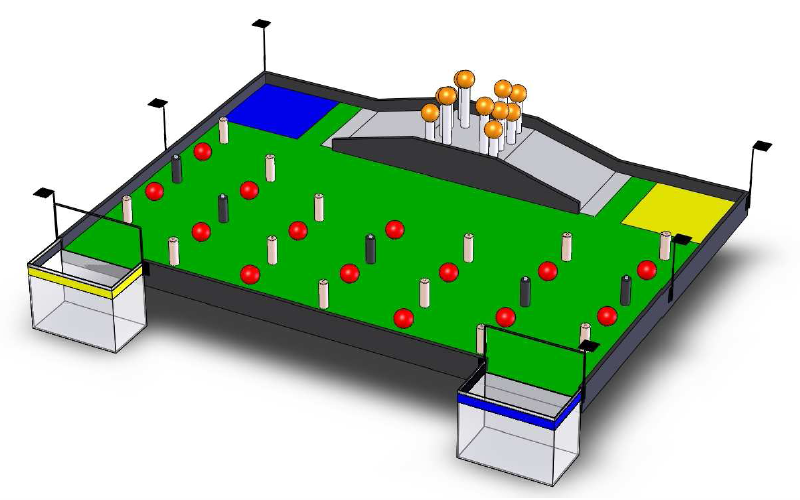
| Unter dem Motto „Feed the World“ traten beim Eurobot 2010 zwei Roboter 90 Sekunden lang gegeneinander an und versuchten in dieser Zeit möglichst viele Orangen, Tomaten und Maiskolben zu ernten und in Behälter abzulegen.Unser Wettbewerbsroboter Kobra, mit dem wir beim nationalen Vorentscheid des Eurobot in Leipzig an den Start gegangen sind, konnte von insgesamt 13 angemeldeten Teams den siebten Platz belegen . |  |

(Animation – bitte klicken) |
Poster: PDF Download (45 MB) |
 |
|
In der Eurobot-Saison 2010 hatten wir uns entschieden, an unserem Roboter viele neue Systeme zu entwickeln und zu testen. Neu waren in diesem Jahr unter anderem der Omni-Antrieb, die Lokalisierung per Infrarot-Sensoren, die Auswertung von Kameras und PMD-Sensor und Teile der Rechentechnik.
Die Vielzahl an Neuerungen brachte jedoch auch zahlreiche Fehler mit sich, die wir bis zum deutschen Vorentscheid an der HTWK in Leipzig nicht vollständig beheben konnten.
Trotzdem ist es uns gelungen einen Roboter zu entwickeln, der die gestellte Aufgabe lösen kann.
