Ein ganzes Wochenende voller Robotik, Teamgeist und spannender Matches liegt hinter uns: Vom 24. bis 26. April 2026 fand der deutsche Eurobot erneut in Dresden statt. Nach intensiven Monaten der Vorbereitung durften wir als TU Dresden Robotik AG (TURAG) nicht nur unseren neuen Roboter ins Rennen schicken, sondern auch wieder als Gastgeber auftreten.
Fünf Teams aus ganz Deutschland traten gegeneinander an, mit dem gemeinsamen Ziel, sich einen der begehrten Plätze für den internationalen Wettbewerb in Frankreich zu sichern. Mit dabei waren:
- Bodensee RobotiX (Konstanz)
- Die DOsen Stapler (Augsburg)
- MAI Robotics (Markt Indersdorf)
- M.A.M.U.T (Gießen)
- TU Dresden Robotik AG (Dresden)
Der RoboterClub Aachen konnte dieses Jahr leider nicht teilnehmen, da ein interner Umzug an der Universität die Vorbereitungszeit zu stark eingeschränkt hat.
Starker Start in die Vorrunden
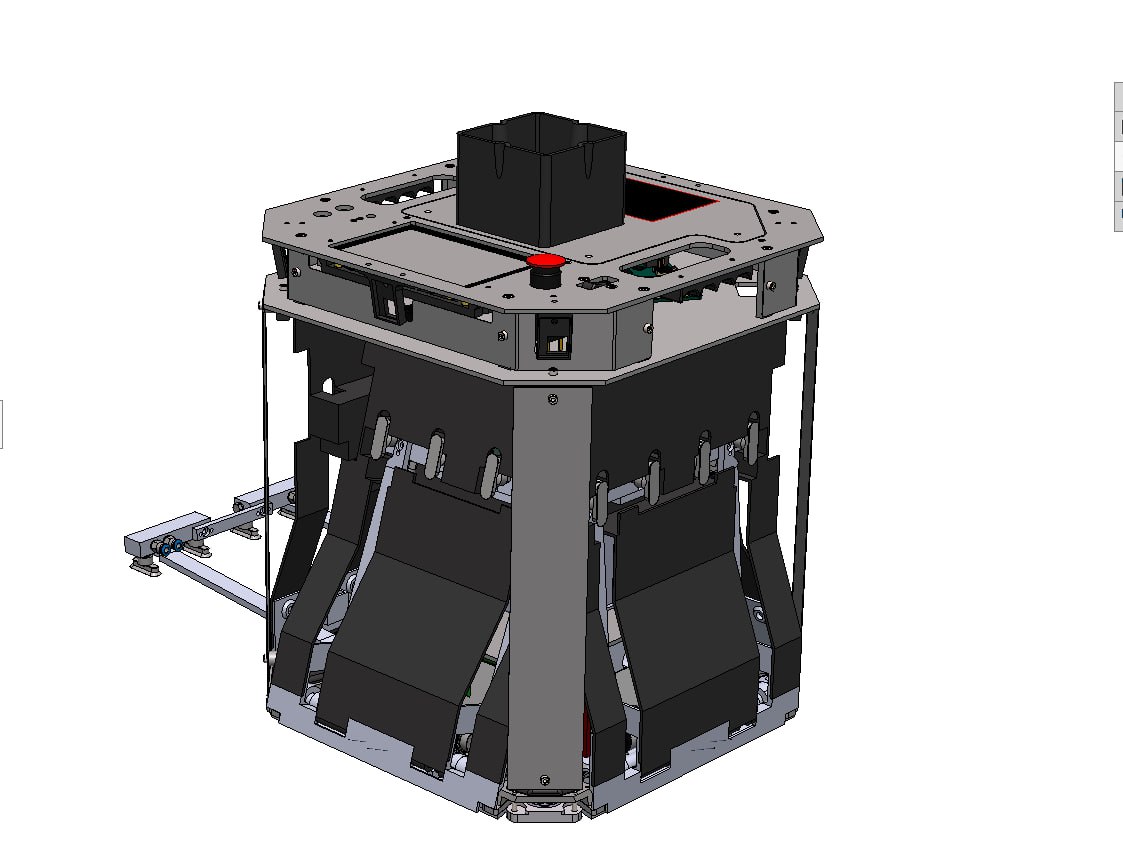
Die Vorrunden am 25. und 26. April boten bereits zahlreiche spannende Begegnungen. Unser Hauptroboter Thaddäus, benannt nach der bekannten Figur aus SpongeBob Schwammkopf, konnte dabei von Beginn an zeigen, welches Potenzial in ihm steckt. Trotz kleinerer Probleme in zwei Matches lief der Roboter nach einem kurzen Boxenstopp wieder stabil und zuverlässig.
Insgesamt konnten wir uns in den Vorrunden erfolgreich behaupten und uns so eine starke Ausgangsposition für das anschließende Finale sichern.
Finale mit klarem Ergebnis
Direkt im Anschluss an die Vorrunden ging es in die entscheidenden Finalrunden – und hier zahlte sich die Platzierung in den Vorrunden aus. Mit einer konstanten Leistung und einer soliden Strategie konnten wir uns schlussendlich den ersten Platz sichern.

Ergebnis
1. TURAG (TU Dresden Robotik AG)
2. MAI Robotics
3. Bodensee RobotiX
Ein besonderes Highlight war erneut die Leistung von MAI Robotics: Die Schüler aus Markt Indersdorf konnten sich, wie bereits im Vorjahr, erfolgreich für den internationalen Wettbewerb qualifizieren und demonstrierten eindrucksvoll ihr Können.
Ein Wochenende, das in Erinnerung bleibt
Wir blicken mit großer Freude auf den diesjährigen deutschen Eurobot zurück. Sowohl organisatorisch als auch im Wettbewerb selbst war das Event für uns ein voller Erfolg. Besonders stolz sind wir auf die Leistung unseres Teams und darauf, wie gut sich die Vorbereitung und ein durchdachtes Konzept ausgezahlt haben.
Nun richtet sich unser Blick nach vorne: Wir freuen uns darauf, Deutschland erneut beim internationalen Eurobot in Frankreich vertreten zu dürfen – und sind gespannt, was uns dort erwartet.
Ein besonderer Dank gilt allen teilnehmenden Teams für faire und spannende Matches, allen Helferinnen und Helfern vor Ort und ganz besonders unseren Sponsoren. Ohne ihre Unterstützung wäre es uns nicht möglich, unsere Ideen und Projekte in diesem Umfang zu realisieren.