Voller Stolz Präsentieren wir euch hier unsere diesjährigen Roboter Muck und Dizzy.
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
Los ging es für das erste Auto um 6 Uhr. Da wir noch rechtzeitig am Hotel und beim Wettbewerb erscheinen wollten, startete die erste Gruppe etwas eher.
Für das zweite Auto gab es erst 9:30 Uhr das Startsignal, da die Lehrveranstaltungen in der 1. Doppelstunde noch viel zu interessant waren, um sie zu verpassen.
Die Hinfahrt verlief relativ unspektakulär; bis auf ein paar kleinere Staus gab es keine Verzögerungen. Einen Zwischenstop haben wir, nachdem wir Frankfurt a. M. passierten, an einem wohlbekannten Burger-Restaurant an der Abfahrt Ramstein-Miesenstein eingelegt.
Sehr originell: Ein mehrachsiger Roboter in Form eines Krans
Danach ging es über die Grenze nach Frankreich. Über Paris führte die Strecke an Nantes vorbei nach La Roche sur-Yon. Ankunft war für das erste Auto um ca. 21 Uhr. Somit blieb noch genug Zeit für den Check-In im Hotel und die Homologation. Diese verlief ohne Probleme. Nur das Home Automation Panel und die Biene mussten am nächsten Tag homologiert werden, da das zweite Auto erst gegen Mitternacht am Veranstaltungsort ankam.
Da alle ziemlich geschafft von der Fahrt waren, ging es gegen 1 Uhr zurück zum Hotel und ab ins Bett.
Donnerstag, der 10. Mai
Sehr praktisch: Einkaufswagen aus einem lokalen Supermarkt
Damit noch genug getestet werden konnte, ging es um 8 Uhr schon wieder zum Wettbewerb.
Nach erfolgreicher Homologation der Biene und des HAPs waren nun alle „Spielgeräte“ erfolgreich zugelassen. Damit ging es nach der ersten Qualifikationsrunde der französischen Meisterschaft nun auch für uns los. Dank eines Einkaufswagens konnten nur 2 Mitglieder die beiden Bots sowie das HAP, die Biene und unser Gegnererkennungssystem in die Vorbereitungszone und zur Spielplatte transportieren.
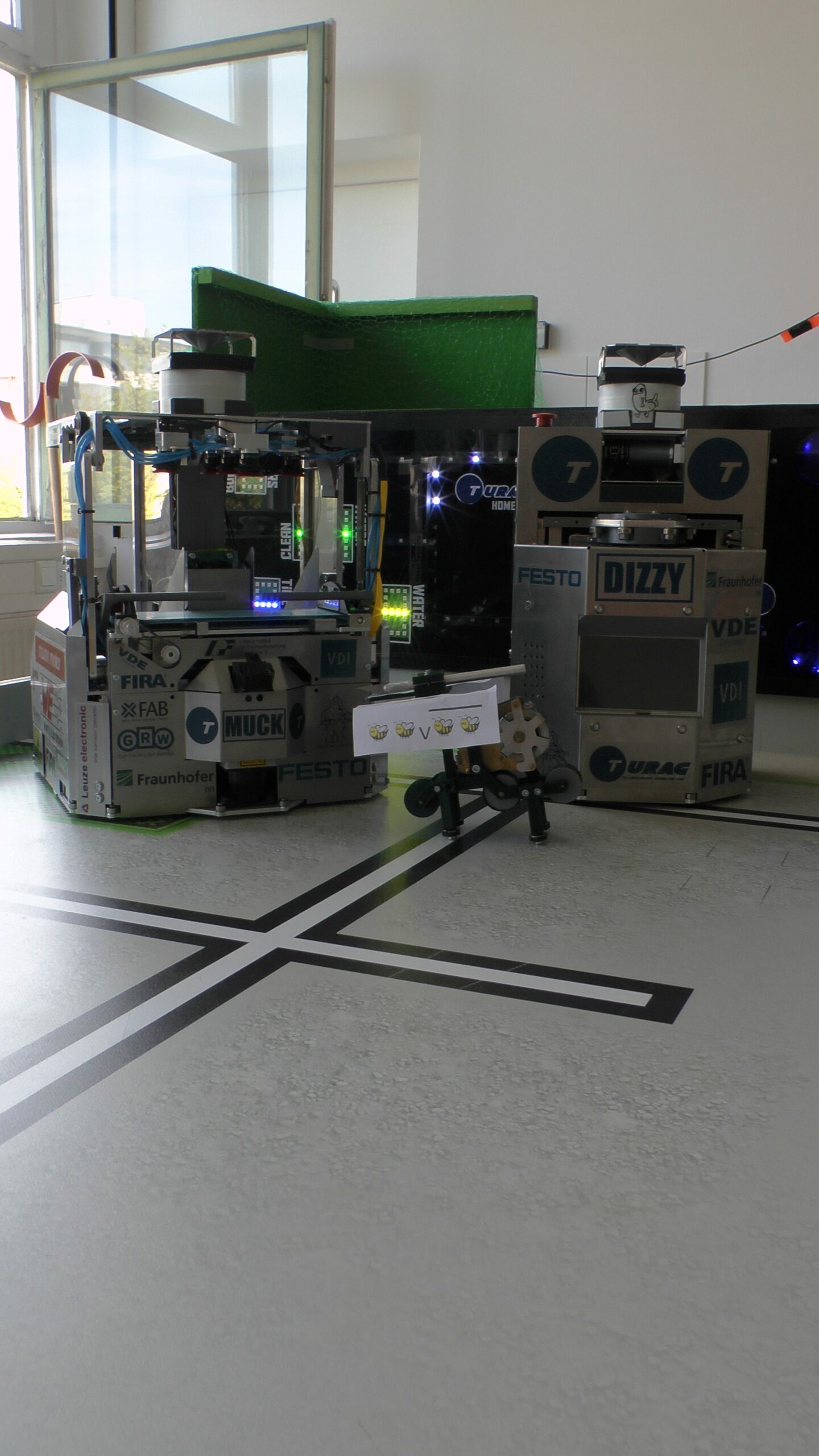
Startaufstellung beim Spiel
Unser erstes Match spielten wir gegen das russische Team SetUP.
Für das erste Spiel lief es gar nicht mal schlecht. Wir haben das Spiel mit 95 zu 20 Punkten gewonnen. Uns sind ein paar Besonderheiten der Wettkampfspielfelder aufgefallen, die wir vorher nicht beobachten konnten, da man auf diesen Platten nicht testen konnte: Der Pfad der Biene war etwas breiter als erwartet, dadurch ist diese an der Kante hängen geblieben.
Auch hat sich der Arm des großen Bots an einem Flachbandkabel verhakt, das durch einen Motorwechsel etwas anders verlegt wurde. Und das HAP hat aufgrund eines IP-Adressfehlers keine Spielinformationen mehr angezeigt.
Alles in Allem waren das Probleme, die wir vor der nächsten Wettkampfrunde beheben konnten.
Im zweiten Match hieß unser Gegner Happy Social Robot, ein Team aus der Schweiz, das im Teamspace mit uns benachbart war.
Nicht nur Eurobot-Roboter waren dort: Hier zu sehen ein Landwirtschaftsroboter
Die Fehlerkorrekturen aus dem ersten Match haben funktioniert, weshalb es größtenteils wie geplant geklappt hat. Nur der kleine Social Bot war ein bisschen sehr kuschelbedürftig und hat Muck immer wieder hinten leicht angestubst. Das fanden die Schiedsrichter nicht so lustig und haben den Notaus bei dem kleinen Schweizer Bot gedrückt. Das bedeutete leider für die Schweizer 0 Punkte.
So ging das Spiel mit 150 zu 0 Punkten für uns aus. Damit war das eine Steigerung im Vergleich zum ersten Spiel, leider hat sich im großen Bot ein Würfel verklemmt, wodurch konnte dieser nicht weiter einsortieren konnte.
Das wars für diesen Tag. Da zwischendurch immer wieder Spiele des französischen Wettbewerbs stattfanden, wurden jeden Tag nur zwei internationale Qualifikationsrunden gespielt.
Außer ein paar kleineren Änderungen und Fixes wurde an diesem Abend nicht mehr viel am Roboter gemacht. Deswegen ging es pünktlich um zwölf Uhr ins Bett, damit wir am nächsten Tag fit für die letzten beiden Qualifikationsrunden sein konnten.
Freitag, der 11. Mai
An der Code-Bar gab es Verpflegung
Für den Tag waren eigentlich die dritte und vierte Vorrunde angesetzt. Da die französischen Teams aber ihr Finale erst am Samstag hatten und Gegner für ihre Qualifikationsrunden für den Eurobot brauchten, fand unsere vierte Vorrunde erst am Samstag zwischen den französischen und internationalen Finalrunden statt.
Der abgerauchte Servo
Die dritte Runde war das „Highlight“ unseres kleinen Roboters: Bei dem Spiel gegen das tunesische Team „octagone ENIMonstir“ fing Dizzy nach dem ersten Drittel des Spiels an zu rauchen. Wir hatten es garnicht so richtig bemerkt, als plötzlich eine dichte Rauchwolke über dem hinteren Teil des Bots stand. Dank geistesgegenwärtiger Reaktion unseres Teammitglieds am Spielfeldrand konnte am Bot rechtzeitig der Notaus gedrückt werden, sodass schlimmerer Schaden vermieden werden konnte.
Das Spiel hat „octagone ENIMonstir“ mit 141 zu 0 Punkten gewonnen. Leider wurde das Spiel im Livestream nicht gezeigt, da dieser erst mit Verzögerung startete.
Am Ende der Vorrunde haben wir ein paar Plätze verloren und waren auf dem 15. Platz.
Samstag, der 12. Mai
Bot eines anderen Teams im Minion-Design
Die vierte Vorrunde spielten wir gegen das französische Team „ESEO Angers“ , welches noch Spiele nachholen musste. Deswegen gab es dazu keinen Livestream. Das Spiel lief ganz gut, Muck hat es leider auch diesmal nicht geschafft, seine Türme aufzubauen. Aber dafür hat Dizzy sogar zwei gegenerische Bälle in den Abwasserbehälter gelegt. Das hat der Schiedsrichter aber falsch aufgeschrieben und die Punkte dem anderen Team gutgeschrieben. Lieder ist uns das erst nach dem Spiel aufgefallen. Nach einem Gespräch mit dem gegnerischen Team, welches den Fehler dankenswerterweise bestätigte, und den Schiedsrichtern haben wir für dieses Spiel nachträglich 225 Punkte bekommen. Bis dahin waren das die meisten Punkte, die wir in einem offiziellen Spiel bekommen haben.
Damit sind wir 12. Platz von 35 Teams mit 490 Punkten aus vier Spielen, von denen wir drei gewonnen haben.
Im Achtelfinale spielten wir gegen die „Les 7 MONSquetaires“ aus Belgien.
Das Spiel fing gut an. Muck düste in die Mitte und erkannte das Pattern richtig. Nur leider fiel ein Würfel beim Einsammeln etwas unglücklich aufs Förderband und brach beide Schalter ab. Dadurch konnten keine weiteren Würfel detektiert werden und Muck konnte nichts mehr tun.
Dizzy war sofort am Recuperator und versuchte die Bälle rauszuholen. Der Recuperator stand aber so schräg, dass es Dizzy nicht schaffte, unter den Öffner zu kommen. Daraufhin versuchte er auf die andere Seite zu kommen um sein Glück bei dem anderen Recuperator zu versuchen. Dabei machte ihm der große Roboter des Gegners einen Strich durch die Rechnung: dieser wurde übersehen und es gab eine Kollision, an welcher der gegnerische Roboter aber auch nicht ganz unschuldig war, weshalb es auch keine Strafe gab. Dabei löste sich auch das hintere Schutzblech und der kleine Roboter blieb für den Rest des Spieles stehen.
Vor den Finalspielen im Backstage-Bereich
Das Spiel hatten wir auch dadurch mit 111 zu 181 Punkten verloren und war damit unser Aus im Eurobot-Finale.
Obwohl wir uns erhofft hatten, weiter zu kommen, sind wir mit dem Achtelfinale und dem zwölften Platz nach den Vorrunden zufrieden. Wir haben dieses Jahr zwei Roboter gebaut, die trotz der vielen diesjährigen Neuerungen und Veränderungen sowie der einen Monat geringeren Vorbereitungszeit sehr gut und ohne größere Mängel funktioniert haben.
Wieder einmal konnten wir interessierten Besuchern der TU-Dresden einen Einblick in die Robotik geben und am Uni-Tag unsere erfolgreichen Roboter präsentieren.
Hoffentlich sehen wir einige Interessierte bald auch im Studium wieder!
Wir sind zurück aus La Roche-sur-Yon und der Eurobot 2018 damit vorbei. Aber der Reihe nach.
Die heiße Phase des Eurobot begann für uns als deutsches Team kurz vor unserem Nationalentscheid in Dresden. Beim Wettbewerb konnten wir uns dann, nach anfänglichen Startschwierigkeiten, Stück für Stück steigern und schlussendlich den 1. Platz belegen. Für die TURAG hieß das nach einigen Jahren endlich wieder deutscher Meister!
Gruppenfoto nach dem deutschen Vorentscheid
Entsprechend motiviert sind wir in die zweiwöchige Vorbereitungsphase für den internationalen Wettbewerb gestartet. Bei unserem kleinen Roboter Dizzy ging es im wesentlichen darum die Zuverlässigkeit zu steigern und an einigen Stellen Feintuning zu betreiben. An Muck, dem großen Roboter, wurde zwischen den Wettbewerben noch deutlich mehr gearbeitet. Entsprechend der diesjährigen Regeln war es wichtig das am Rand befindliche Farbmuster zu erkennen um Bonuspunkte auf die gebauten Türme zu erhalten. Unser ursprüngliches Konzept dafür mussten wir wegen Zeitmangels verwerfen und haben stattdessen Muck mit einer Webcam zur Mustererkennung ausgestattet. Das System funktioniert trotz der kurzen Entwicklungs- und Tetstzeit sehr zuverlässig und ermöglicht es noch mehr Punkte im Wettbewerb zu erzielen.
Muck erkennt das Farbmuster links und baut es korrekt in die Türme ein
Der internationale Entscheid des Eurobot wurde, wie schon im letzten Jahr, wieder gemeinsam mit dem französischen „Coupe de Robotique“ in La Roche-sur-Yon in Frankreich ausgetragen. Ähnlich wie beim deutschen Wettbewerb liefen die Spiele hier etwas schleppend an, wir konnten die Leistung unserer Roboter aber von Spiel zu Spiel steigern. Auch ein kleines Feuer an einem Modellbau-Servomotor im Spiel und der daraus resultierende Notaus konnten Muck und Dizzy nicht aufhalten. Trotz dieser mit 0 Punkten gewerteten Vorrunde platzierten wir uns nach der Qualifikation noch auf einem guten 12. Platz. Im Achtelfinale des KO-Systems schieden unsere Roboter leider mit 111 zu 181 Punkten aus. Hier kamen verschiedene Faktoren zusammen: an einigen Stellen mangelte es unseren Robotern am letzten Quäntchen Zuverlässigkeit, an anderer waren die Toleranzen der Plattenaufbauten etwas zu groß.
Wettbewerbsplatten beim Eurobot Finale
Alles in allem sind wir mit unserer Leistung und der unserer Roboter in diesem Jahr aber sehr zufrieden. Mit über 400 möglichen Punkten waren unsere Roboter in einem idealen Spiel in der Lage soviele Punkte wie kein anderes der knapp 200 anwesenden Teams zu erzielen. Wir haben wieder viel gelernt und stecken schon voller neuer Ideen für die nächste Saison. Das Thema wird dann „Atom Factory“ sein. Über unsere zahlreichen Sommerprojekte wird hier an geeigneter Stelle sicher auch informiert.
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
Nach unser erfolgreichen Erstplatzierung im deutschen Wettbewerb sind wir aktuell in Frankreich auf dem internationalen Wettbewerb in La Roche-Sur-Yon!
Alle Interessierten können sich die Spiele im folgenden Livestream anschauen:
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
Nachdem wir vor zwei Wochen in der Schweiz und in den letzten beiden Tagen bei uns in Dresden schon zwei Wettbewerbe hinter uns haben, ist es dringend an der Zeit unsere aktuellen Roboter einmal etwas genauer vorzustellen. Die Planungs- und Entwicklungsphase können wir dabei eigentlich gleich überspringen und zu den fertigen Robotern kommen.
Roboter A: Muck
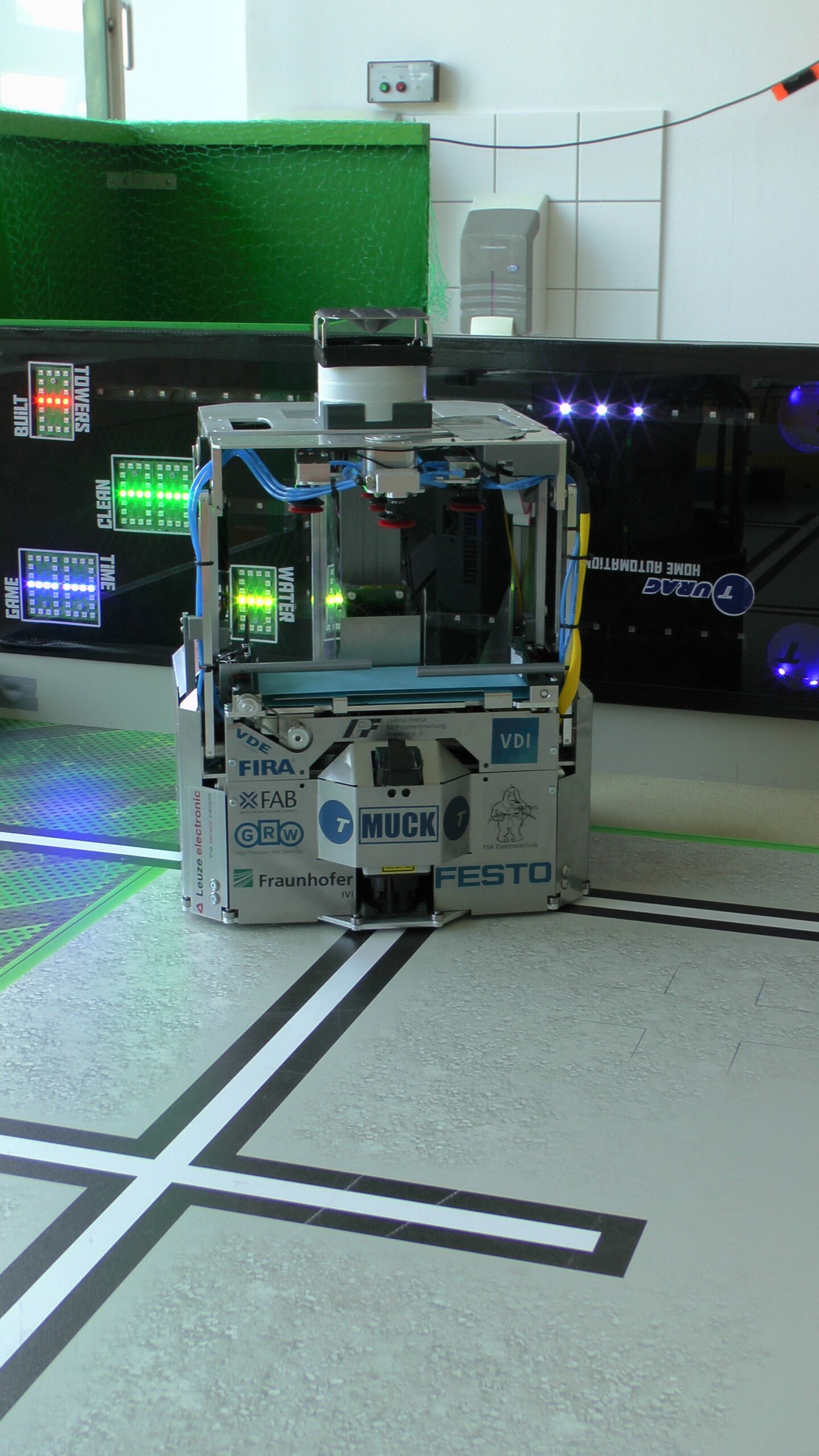
Muck
Muck ist unser großer Roboter. Seine primäre Aufgabe ist es die auf dem Spielfeld verteilten Würfel einzusammeln und daraus Türme zu je fünf Würfeln zu bauen. Er ist dazu mit einem großen Kran ausgestattet, der eine komplette 5er Kombination von Würfeln ansaugen, heben und drehen kann. Entsprechend der vorgegebenen Farbmuster lässt Muck die Würfel in der richtigen Reihenfolge auf sein Förderband fallen und schiebt sie von dort auf die seitlich angebrachten Rutschen. Er kann auf diese Weise bis zu zehn Würfel einsammeln und dann durch das Aufrichten der Metallrutschen in Türme verwandeln.
Roboter B: Dizzy
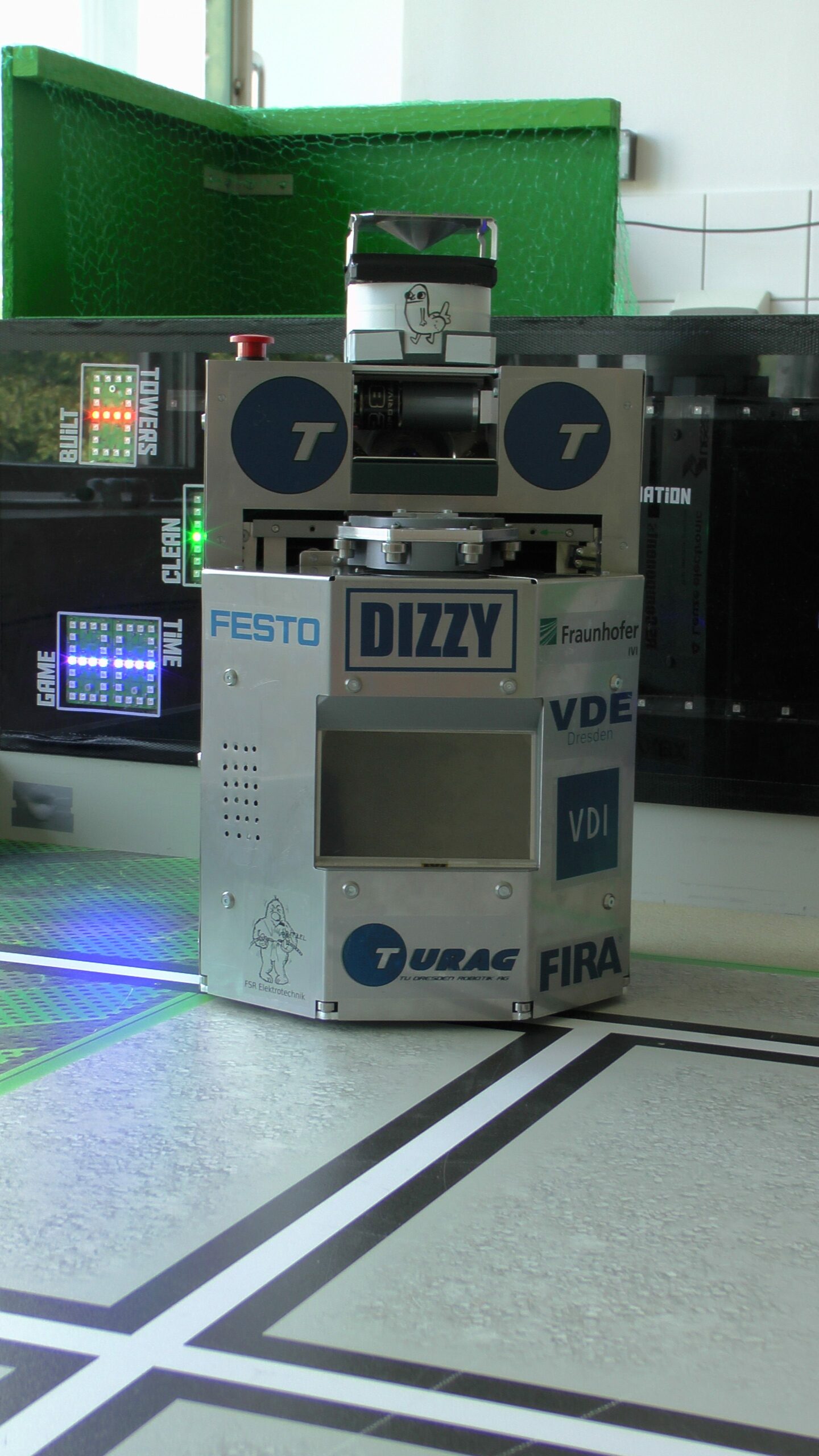
Dizzy
Dizzy, der kleine Roboter, übernimmt das Ausleeren der Wasser-Rekuperatoren. Er öffnet dazu das Ventil und sortiert die darin enthaltenen Bälle in einen Revolver mit 8 Kammern ein. Entsprechend der Farbe der Bälle lässt er sie dann entweder an der Seite einfach in ein Schmutzwasserbecken rollen, oder er bringt sie zurück zum eigenen Wasserturm um dort Frischwasser zu sammeln. Da der Wasserturm höher als die zulässige Bauhöhe des Roboters ist verfügt Dizzy über einen Schussmechanismus, der die Bälle wie bei einer Tennisballschussmaschine beschläunigt und treffsicher in den Behälter befördert.
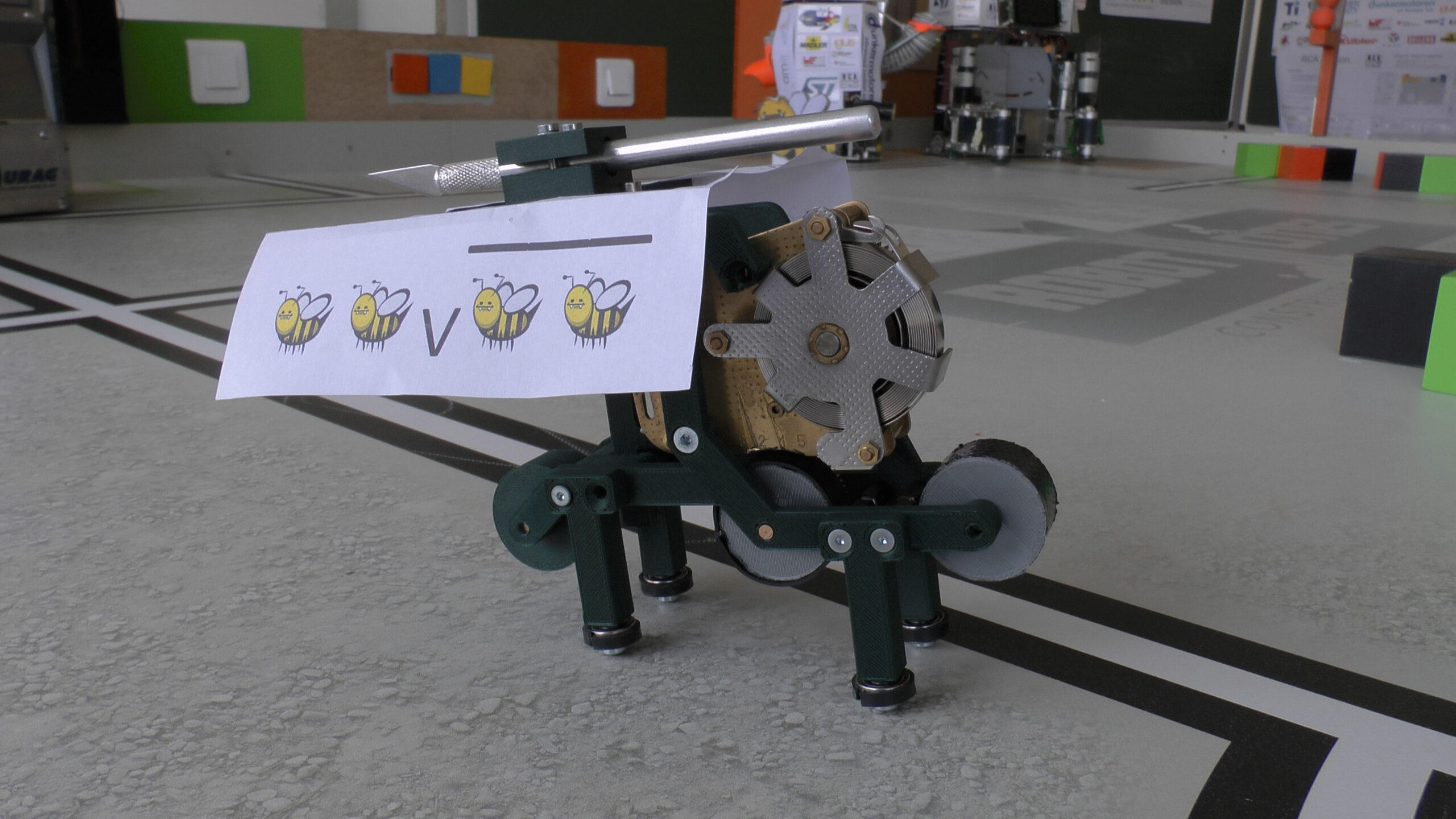
Die Roboterbiene: Sir Lanzelot Neu in diesem Jahr war die Aufgabe eine rein mechanisch angetriebene Roboterbiene zu bauen. Ihre Aufgabe ist es mit einen vorgegebenen Pfad entlangzufahren und am Ende einen Ballon zum Platzen zu bringen, nachdem ein Roboter sie aktiviert hat. Sir Lanzelot besteht im Kern aus dem Aufziehmechanismus eines Fischfutterautomaten den wir so umgebaut haben, dass er durch ein leichtes Tippen auf den Kopf ausgelöst wird und ein Rad antreibt .
Die Bien „Sir Lanzelot“
Das Home-Automation-Panel Das Home-Automation Panel, kurz HAP, darf laut Regeln in beliebiger Art und Weise auf sich aufmerksam machen wenn es von einem Roboter eingeschaltet wird. Wir haben uns dafür entschieden auf dem Panel Informationen über das laufende Spiel anzuzeigen. So sollen zum Beispiel die Anzahl der gestapelten Würfel und der gesammelten Bälle dort angeueigt werden.
Das HAP
Beim Deutschen Wettbewerb haben wir dieses Wochenende den 1. Platz belegt und uns damit gemeinsam mit dem RCHH aus Hamburg und dem Team MAI aus Markt Indersdorf für die Teilnahme am Internationalen Entscheid in Frankreich qualifiziert.
Schon bald wollen wir hier unsere beiden neuen Roboter für die Saison 2018 vorstellen – die diesjährige Konstruktionsphase ist nämlich schon beinahe abgeschlossen! Doch zunächst sollen die Ergebnisse unserer Prototypingphase Erwähnung finden. Vielleicht findet sich der ein oder andere Mechanismus auch in den beiden Robotern wieder?
Seit Veröffentlichung der Regeln im Oktober waren wir damit beschäftigt, uns neue Varianten für die Umsetzung der Aufgaben für das Thema „Robot Cities“ zu überlegen. Dabei sind viele verschiedene Ideen heraus gekommen, wobei einige mehr und andere weniger ernst gemeint waren. Auf jeden Fall hatten wir großen Spaß dabei, endlich wieder kreativ zu werden.
Außerdem haben wir seit heute Dank der freundlichen Unterstützung von Krokodilhaus eine wunderschöne bedruckte Spielplatte, sodass unsere Programmierer sofort loslegen können, um die TURAG-eigene Farbometrie zu kalibrieren.
Unter dem Motto „Robot Cities – built a better world“ gilt es für uns auch in diesem Jahr wieder zwei Roboter zur Teilnahme am Eurobot zu entwerfen. Die Entwicklung ist schon in vollem Gange, zunächst aber etwas zu den diesjährigen Aufgaben:
Neues Thema: Robot Cities
Wie immer treten beim Eurobot zwei Teams mit jeweils bis zu zwei Robotern auf dem bekannten 2x3m Feld gegeneinander an, die Teamfarben sind Orange und Grün. Das Setting gibt dieses Jahr vor, dass die Roboter Städte errichten und dabei besonders auf ihre Umwelt achten müssen.
Die Wettbewerbsumgebung in dieser Saison
Für die Roboter selbst gibt es zwei wesentliche Aufgaben:
Beipiele für „Häuser“ im Hintergrund das „Home automation panel“
1. Die in 5er Kombinationen auf dem Feld verteilten Würfel stellen Baumaterial zum Errichten von Häusern dar (zum Beispiel sind blaue Würfel Solarmodule). Die Würfel müssen entsprechend vom Roboter aufgesammelt und zu einem Turm gestapelt in der Bauzone am oberen Ende des Spielfelds abgestellt werden, je höher das Haus desto besser. Wie genau Häuser aufgebaut werden müssen ändert sich jede Runde, die aktuelle Vorgabe muss der Roboter anhand des am Rand angebrachten Farbcodes erkennen und in seinen Bauwerken entsprechend umsetzen.
2. Es müssen Wasserbehälter am Rand des Spielfelds geleert und das Wasser in die richtigen Behälter umgefüllt werden. Echtes Wasser gibt es dieses mal nicht, dafür dienen Schaumstoffbälle als Ersatz. Die Bälle in der Farbe des konkurierenden Teams stellen Abwasser dar und müssen am vorderen Tischende in eine Kläranlage entladen werden, von dort kann sie der gegnerische Roboter dann wieder einsammeln, schließlich hat das Wasser in seinem Fall die eigene Teamfarbe und ist somit „sauber“. Nutzbares Wasser, also Bälle der eigenen Teamfarbe, müssen in die großen Wassertürme am oberen Ende der Wettkampfplatte entladen werden. Schwierig ist hierbei die Höhe der Öffnungen 400mm oberhalb des Tisches, die Bälle müssen deshalb vom Roboter aus abgeschossen werden.
Neu sind in diesem Jahr zwei zusätzliche Aufgaben:
Jedes Team muss ein „Home automation panel“ entwerfen, dass nur eigens entwickelte Elektronik enthalten darf und über einen Schalter am oberen Ende der Platte vom Roboter aktiviert wird. Bei der Umsetzung dieses Panels sind der Kreativität keine Grenzen gesetzt.
Außerdem verfügt jedes Team über eine Biene. Diese muss rein mechanisch sein und darf keine elktronischen Bauelemente enthalten. Die Biene wird von einem Roboter aktiviert und muss dann selbstständig auf dem schmalen Rand am unteren Ender des Spielfeldes entlang fahren um vor Beendigung des Spiels die „Blume“ in Form eines Ballons zu erreichen und diesen platzen zu lassen.
Übersicht über alle Spielelemente
Außerdem gibt es einige Neuerungen bei den Gegnererkennungssystemen und anderen Vorschriften, dazu kommen wir im Laufe der Saison noch.
Am Mittwoch den 11.10.2017 werden wir direkt nach der wöchentlichen Sitzung um 18:30Uhr eine kleine Einführung in unsere Vereinsarbeit geben und vielleicht auch dein Interesse an der TURAG wecken.
Für Fragen stehen wir gerne offen.