Neben der Entwicklung cooler Roboter liegt uns insbesondere die Arbeit mit Schüler:innen sehr am Herzen. Was man später lernen oder studieren will ist eine sehr schwierige Entscheidung und oft hilft eine kleine positive Erfahrung, um dabei zu helfen.
ScrapBot Challenge 2025
Sommeruni 2024
LNdW 2024
Sommeruni 2013
Als TURAG nehmen wir regelmäßig an Veranstaltungen wie der Langen Nacht der Wissenschaften und der Sommeruni teil. Zusätzlich organisieren wir eigene Workshops, bei welchen interessierte Bastler als Team aus einfachen Materialien ihre eigenen Roboter bauen und damit in kleinen Challenges gegeneinander antreten können. Damit wollen wir Schüler:innen einen ersten Einblick in die spannende Welt des Ingenieurswesens geben und sie anregen, sich kreativ Herausforderungen zu stellen.
Falls Sie Interesse haben, uns mit Ihren Schüler:innen zu besuchen, schreiben Sie uns am besten eine Mail.
TURAG erhält Eurobot Mediation Award für das Engagement in Schülerprojekten
Für uns bricht ein neues Kapitel an, denn in Zukunft werden wir neben dem EUROBOT auch an der UAS Challenge teilnehmen. Für die UAS Challenge entwickeln wir ein Drohne, die unter anderem eine bestimmte Strecke autonom zurücklegt, eine Last in einem bestimmten Gebiet abwerfen und eine Markierung auf dem Boden erkennen kann. Bei der Entwicklung können wir auf unsere langjährige Erfahrung durch den Roboterbau für den EUROBOT zurückgreifen, müssen aber auch viele neue Herausforderungen meistern. Das erste Konzept für Rüdiger steht bereits und auch das Concept-Paper haben wir eingereicht. Wir freuen uns schon auf die kommenden Projektphasen und halten euch natürlich auf dem Laufenden.
Endlich ist es soweit! Am vergangenen Samstag, 18. September 2021, wurden die Regeln für die kommende Eurobot-Saison veröffentlicht. Dieses Mal werden unsere Bots die Ruinen antiker Roboterzivilisationen erkunden. Bei den Ausgrabungen erwarten sie geheime Schätze und heilige Statuen.
Sobald die finalen Regeln veröffentlicht wurden (voraussichtlich am 17. Oktober 2021), berichten wir detailliert über die bevorstehenden Herausforderungen!
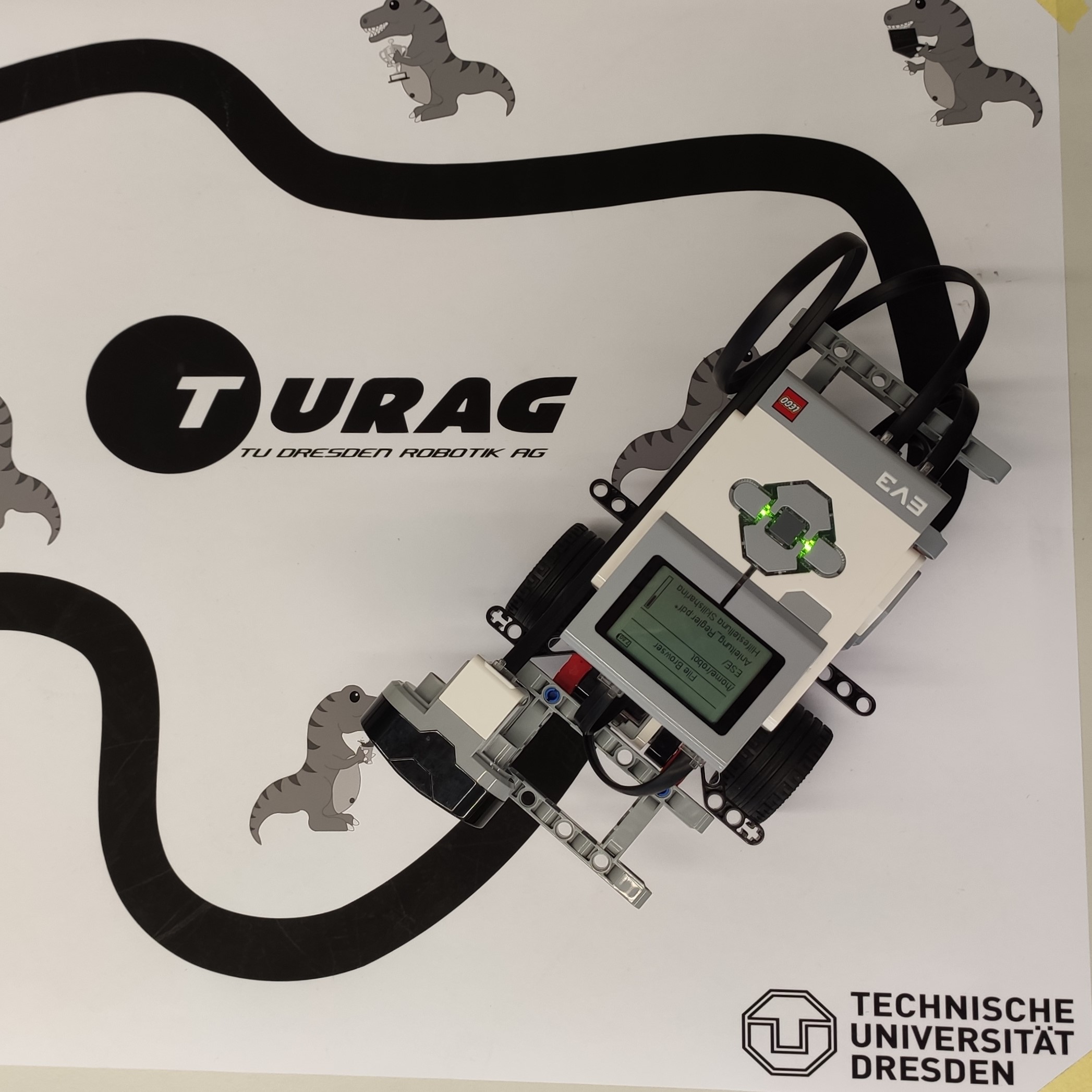
Auch dieses Jahr haben wir wieder die Ersties der Fakultät Elektrotechnik und Informationstechnik zum Skill-Sharing-Day eingeladen. Im Workshop haben die Studienanfängerinnen und Studienanfänger die Grundlagen der Regelungstechnik kennengelernt und Lego EV3 Roboter programmiert.
Das Ergebnis des Skill-Sharing-Days:
Der Roboter erkennt mittels Infrarotsensor Hindernisse und vermeidet so Kollisionen. Dazu stoppt er die Bewegung, dreht um und setzt die Linienverfolgung fort.
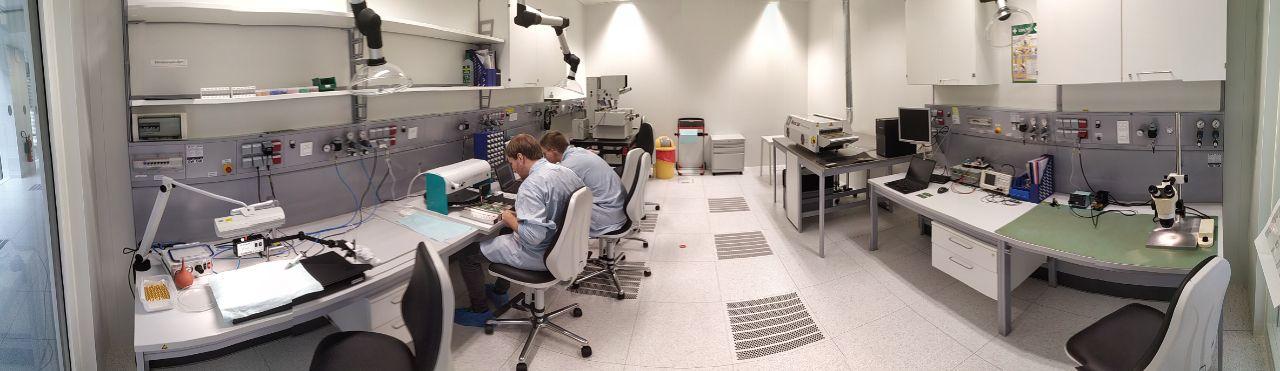
Nach dem wir seit letztem Herbst eine neue Platine für die Antriebsregelung und Lokalisierung unserer Roboter entwickelt und bereits mit einem Prototypen getestet haben, konnten wir eine zweite Version mit einigen Verbesserungen fertigen. Das Institut für Aufbau und Verbindungstechnik der TU Dresden ermöglichte uns dafür die Nutzung eines Reinraums. Durch die Beta LAYOUT GmbH wurden wir mit einer hochwertigen Grundlage, den eigenentwickelten PCBs unterstützt.
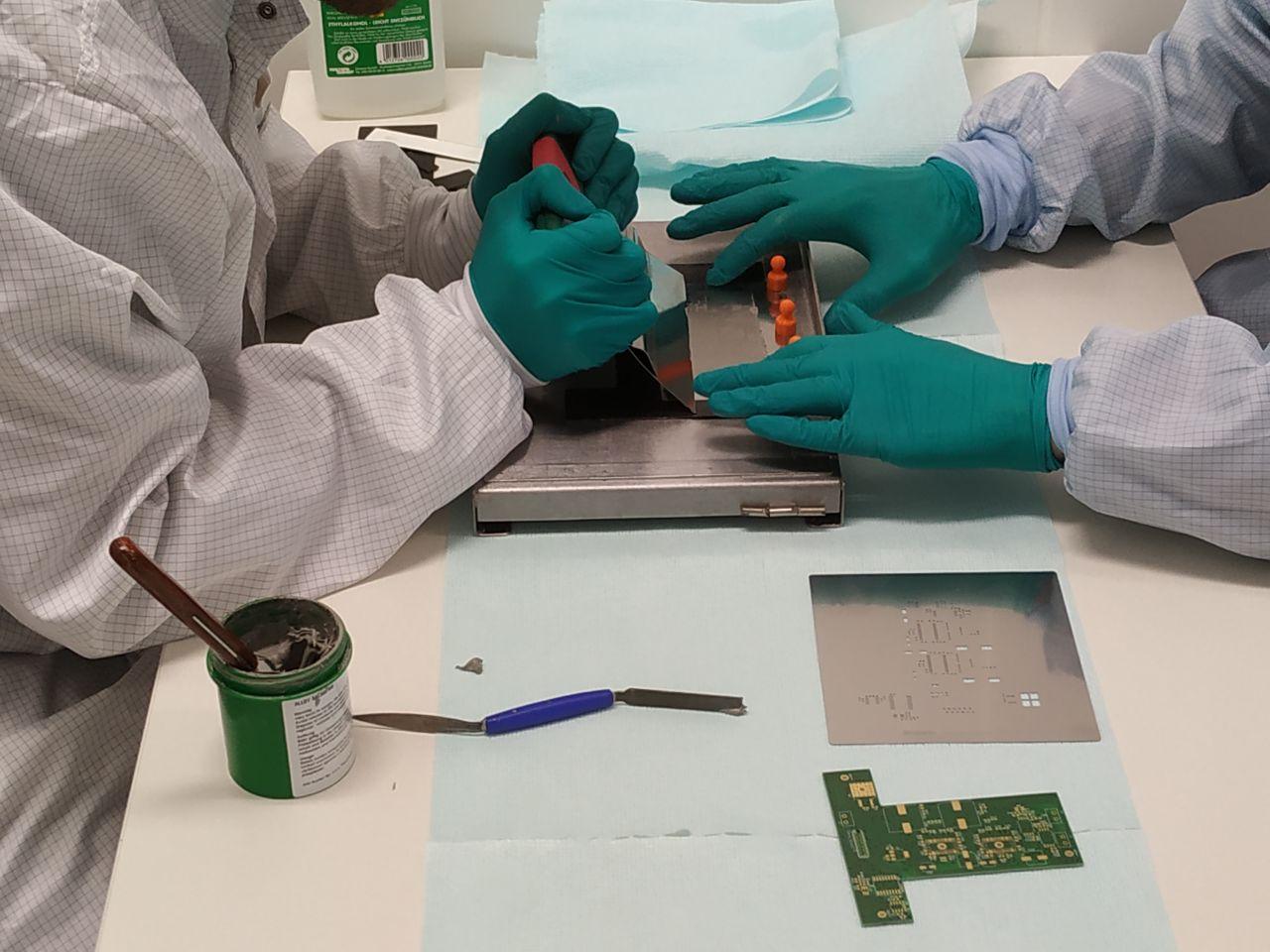
Zunächst wurde Lötpaste auf die Pads mit den mitgelieferten Schablonen aufgetragen.
Nach der optischen Kontrolle des Pastenauftrags konnte direkt zum Platzieren der Komponenten durch einen manuellen Bestückungsautomaten übergegangen werden. Wegen einer Vielzahl kleiner passiver Komponenten nahm dies die meiste Zeit in Anspruch. Durch Würth Elektronik wurden wir dafür mit zahlreichen Kondensatoren, Widerständen, Spannungsreglern und Dioden unterstützt.
Einfahrt in die erste VorheizzoneZweite VorheizzoneReflowzone
Die Platinen konnten nun in den Reflow-Ofen, den sie in den drei Zonen durchlaufen haben. Dabei wurde die Paste in der dritten und damit letzten Reflow-Zone bei über 200 Grad Celsius aufgeschmolzen.
Das Ergebnis der abschließenden optische Kontrolle unter dem Mikroskop war zufriedenstellend. Eine kritische Komponente, der STM32H7-Mikrocontroller, war korrekt montiert. Es kam allerdings zur Brückenbildung zwischen einigen benachbarten Pads, so dass dort noch manuell nachbearbeitet werden muss.
als gesamte Antriebsblockbaugruppe
Wir finden das Ergebnis kann sich sehen lassen. In diesem Zusammenhang möchten wir unseren Unterstützern danken, die uns durch Komponenten und Werkzeugen dieses Projekt ermöglicht haben.
Habt ihr euch schon einmal über die Mobilität der Zukunft Gedanken gemacht? Die Mitarbeiter der FDTech GmbH tun das jeden Tag. Wir freuen uns daher sehr, am 19. März 2020 im Rahmen einer Exkursion zu FDTech in Chemnitz auch einmal hinter die Kulissen schauen zu dürfen.
Falls Du Interesse haben solltest, uns zu begleiten, dann melde Dich einfach bei uns!
3D-Druck ist aus der Entwicklung und Konstruktion unserer Roboter gar nicht mehr wegzudenken. Wichtig ist dabei nicht nur ein guter Drucker, sondern auch das passende Filament.
Wir setzen seit einiger Zeit Fillamentum ASA Extrafill ein und sind absolut begeistert. Es weist eine hervorragende Festigkeit und geringe Feuchtigkeitsaufnahme auf. Außerdem ist es verzugsarm und hält auch anspruchsvollen Belastungen stand.
Fillamentum hat ein kleinen Artikel über uns veröffentlicht. Schaut doch einfach mal vorbei.
Zur Abwechslung berichtet hier einmal jemand über uns: die Firma MÄDLER.
Seit vielen Jahren zählt MÄDLER zu unserern Unterstützern und wir freuen uns, beim Eurobot 2020 unter anderem auch Dank MÄDLER Teilen unsere Roboter auf Segelreise schicken zu können.
Heute möchten wir Ihnen den @TURAG_eV vorstellen, bestehend aus einer studentischen Robotikarbeitsgruppe der @tudresden_de. Die Studenten entwerfen und konstruieren autonome Roboter und sammeln auf diese Weise ergänzend zum Studium zahlreiche Erfahrungen in der Praxis. #TURAGpic.twitter.com/DygRx06YYj
Der diesjährige Eurobot steht unter dem Motto „Sail The World!“. Bereitet euch darauf vor, gemeinsam mit uns in See zu stechen und die Ozeane zu erkunden!
Spielfeld für die Saison 2020
Folgende Aufgaben gilt es dabei zu lösen:
Errichte Fährwege (Create fairways).
Richte die Windsäcke auf (Lift up the windsocks).
Schalte den Leuchtturm ein (Switch on the lighthouse).
Ankere sicher (Anchor safely).
Hisse die Flaggen (Hoist your flags)
Schätze die Leistung (Estimate the performance).
Bei der ersten Aufgabe gilt es die Bojen, welche durch einen Sturm auf dem Meer verteilt wurde, einzusammeln und damit wieder Fährwege zu errichten. Insgesamt gibt es 44 Bojen. Vier davon sind für jedes Team reserviert.
An der Vorderseite befinden sich Windsäcke, die ebenfalls durch den Sturm umgeworfen wurden. Diese sind drehbar gelagert und müssen wieder aufgestellt werden.
die Windsäcke müssen wieder aufgestellt werden
Eine besondere Aufgabe ist es, einen Leuchtturm, welcher außerhalb des Spielfeldes steht, auf eine Höhe von über 70cm ausfahren zu lassen. Außerdem muss der Leuchtturm über eine Befeuerung verfügen welche mindestens 180° durch eine Bewegung abdeckt.
Jeder Roboter kann über einen Fahnenmast verfügen, an welchem mindestens zwei Flaggen entsprechend dem internationalen Flaggenalphabet gestaltet sein müssen. Diese Flaggen dürfen dann innerhalb der letzten fünf Sekunden eines Spiels auf mindestens 35cm gehisst werden.
Die letzte Aufgabe ist seit einigen Jahren fester Bestandteil des Wettbewerbs. Ziel ist es, die im Spiel erreichten Punkte zu schätzen. Für eine gute Bewertung gibt es entsprechend viele Punkte.
Die offiziellen Regeln (englische Version) stehen unter folgendem Link zur Verfügung. Dort sind sämtliche Regeln sowie die weitere Reglementierungen detailliert aufgeführt. Für weitere Fragen sowie Diskussionen zu den Regeln und Aufgaben gibt es das Forum.