
Mitte September hat für uns eine neue spannende Saison unter dem Motto „Farming Mars“ begonnen. Damit die TURAG-Astronauten bei ihrer Ankunft auf dem kahlen Planeten gut versorgt sind, hat unser Roboter die wichtige Aufgabe bekommen, diesen zu bepflanzen und eine gute Lebensgrundlage zu schaffen.
Dafür sollen kleine Plastikpflanzen in Übertöpfe platziert und anschließend in „Gewächshäusern“ abgestellt werden. Die Pflanzen sollen natürlich auch wachsen und Früchte tragen. Dafür sollen kleine Schwarmroboter getarnt als Marienkäfer diese „bestäuben“. Eine genaue Erklärung der Regeln findet ihr jedoch unter unserem letzten Beitrag.



Nach vielen Wochen der Ideenfindung und -diskussion, langen Prototyping-Nächten und natürlich viel Koffein ist schließlich unser Bot „Marl°E“ entstanden:
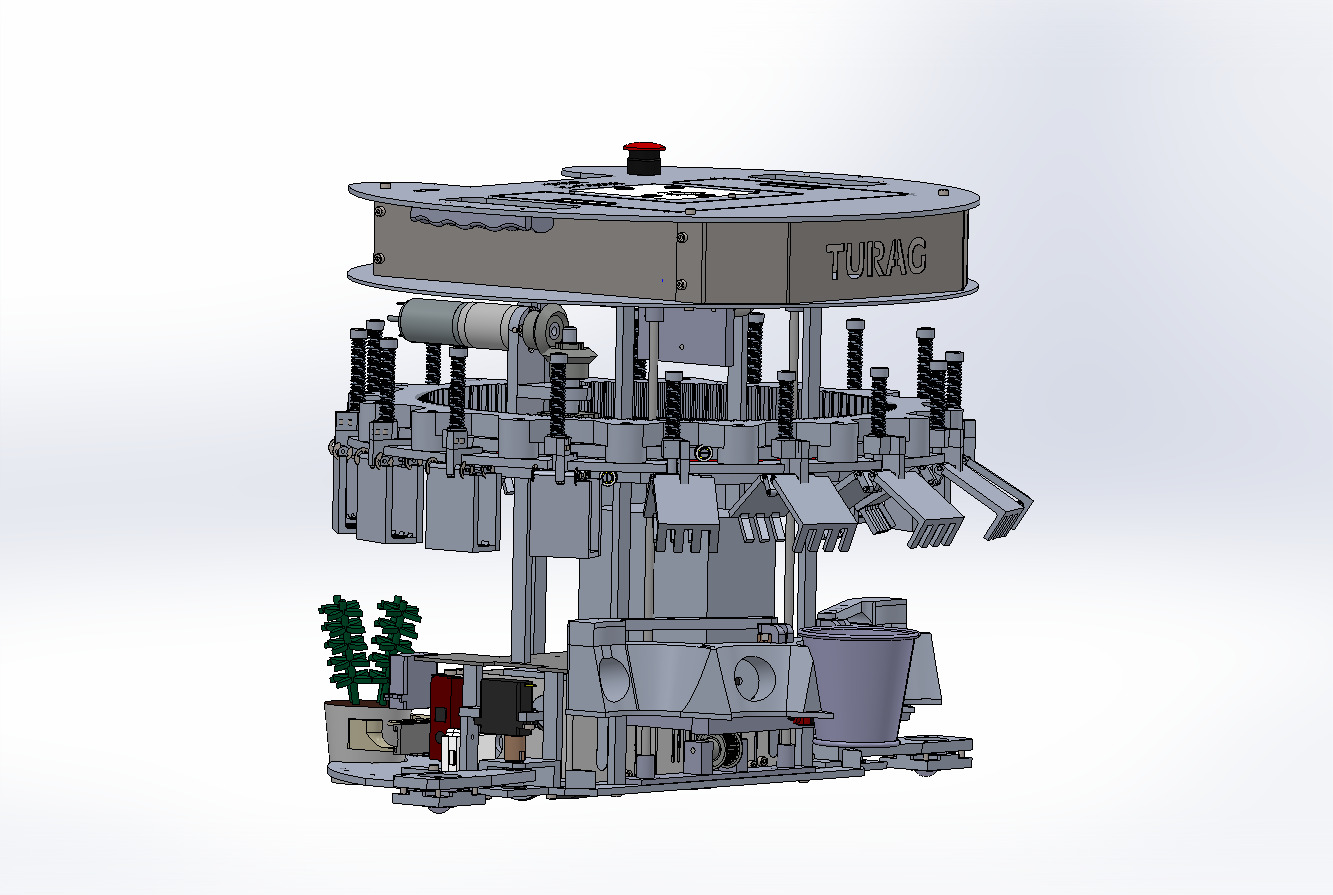
Dieser sammelt über zwei individuelle Greifer die Pflanzen ein und fährt sie über einen Fahrstuhl in unseren Revolver. Darin können insgesamt 16 Pflanzen gespeichert werden. Zusätzlich ermöglicht uns dieser das Sortieren der zwei Pflanzenarten. Auf der gegenüberliegenden Seite ist ein Kamm, über den wir die Töpfe mittels Elektromagneten aufsammeln und festhalten können. Da die Gewächshäuser beziehungsweise „Planter“ hinter dem Rand des Spielfeldes liegen, kann dieser Kamm angehoben und über den Rand gefahren werden. Die Töpfe inklusive Pflanzen werden anschließend darin fallen gelassen. Dabei müssen wir jedoch aufpassen – umgekippte Pflanzen können nicht wachsen und bringen deshalb keine Punkte.
Zusätzlich wird es bei uns noch vier Marienkäfer gleicher Bauart geben. Die Aufgabe der Schwarmroboter ist es, zu den Gewächshäusern zu fahren und jeweils eine Pflanze zu berühren. Dafür setzen sie sich aus einem Fahrwerk und zwei Ärmchen zur Flächenerweiterung zusammen.
Die Prototypen und das digitale Modell sagen, dass unsere Idee so funktioniert- im realen kann es jedoch ganz anders aussehen. Wir sind deshalb schon sehr gespannt, wie sich unser Bot und unsere Schwarmroboter im Frühjahr zusammengebaut und verkabelt verhalten werden!