
![]()
Die Roboter werden in diesem Jahr zu Piraten, die sich mit ihren Schiffen auf Schatzsuche begeben. Dabei ringen sie mit anderen Piraten um den größten Schatz der Peanut Insel. Große Mengen an Gold und Münzen warten auf sie. Werden die Piraten die Schatzkarte finden, oder müssen sie, auf einer einsamen Insel gestrandet, alle Hoffnung in eine Flaschenpost legen?


Zumindest allein werden sie nicht sein, denn dieses Jahr darf jedes Team zwei Roboter gleichzeitig auf die Suche nach den verborgenen Kostbarkeiten schicken. Wir sind deswegen fleißig am Konstruieren und unsere gerade fertig gewordene Spielplatte wartet schon auf die ersten Tests des Roboters… Oder vielleicht auch der Roboter?
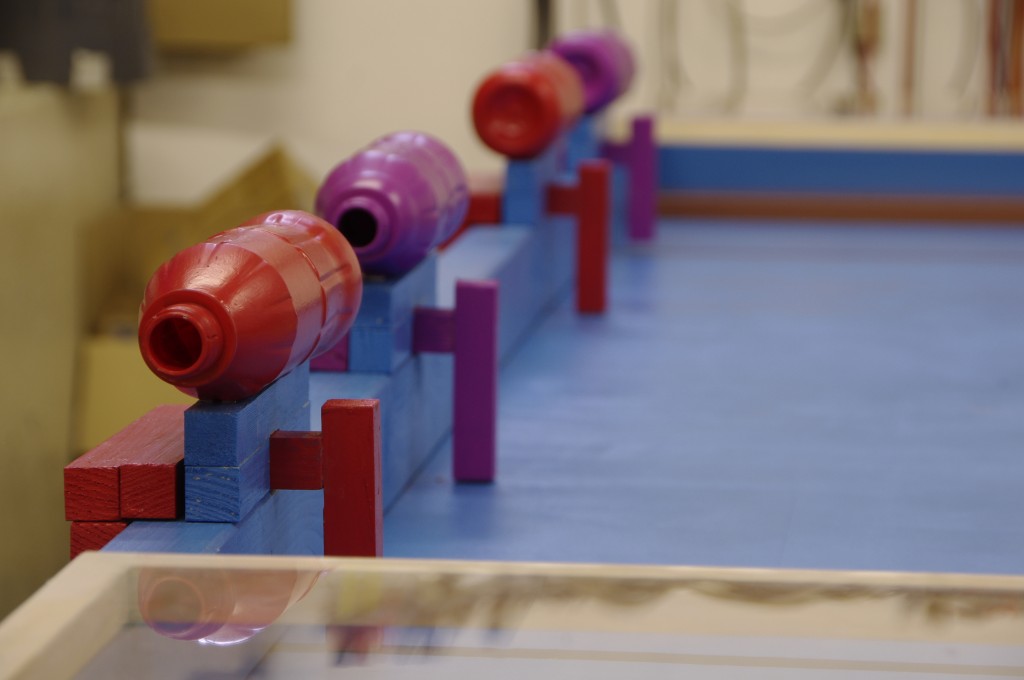
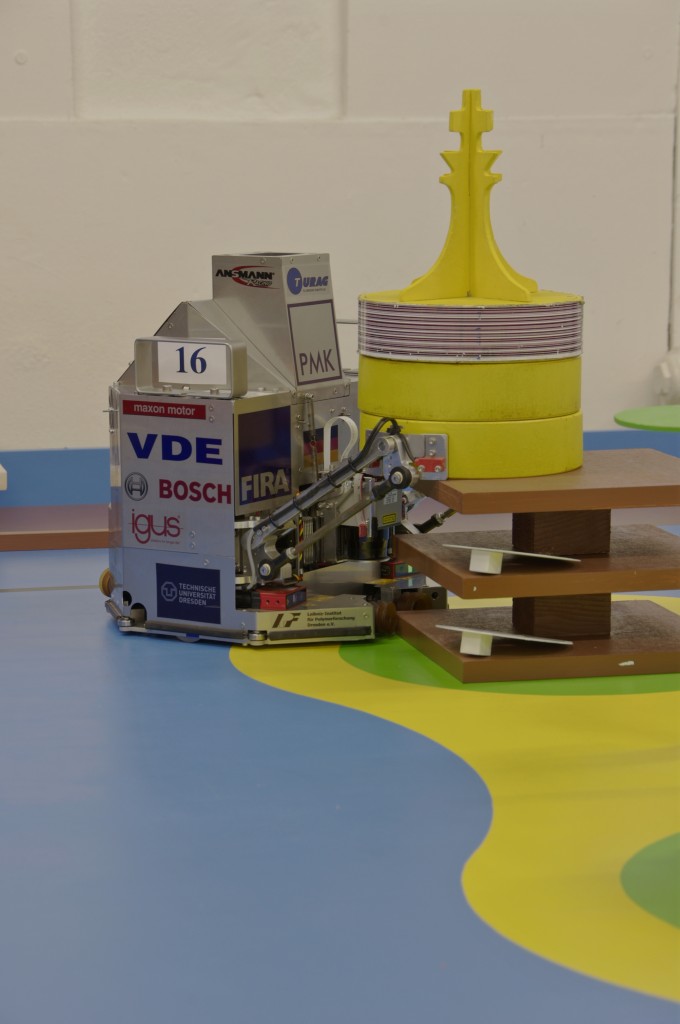
In der Mitte der Platte befindet sich die Peanut Insel. Auf diesen stehen zwei Totems, die zu Beginn des Spiels voller Münzen und Goldbarren sind. Im „Meer“ darum werden zusätzliche Elemente verteilt sein. Es gilt nun die Schätze schnell zu sammeln und im eigenen Schiff (braune Flächen links unten bzw. rechts oben im Bild) zu verstauen. Dabei darf natürlich auch aus dem Ladedeck des anderen Teams gestohlen werden. Also ist Vorsicht geboten, denn am Ende zählen nur Münzen und Goldbarren, die im eigenen Schiff liegen. Zusätzliche Punkte können durch werfen von Flaschenpost (der eigenen Farbe; dazu jeweils die Hebel unter den Flaschen links betätigen) und das Aufdecken der Schatzkarte (fehlt noch; ansonsten über der Bande am Halbkreis) errungen werden.
Dass das Meer sich gut befahren lässt, hat Scrat schon bewiesen. Ob man allerdings wieder Punkte für Türme bekommt, ist fraglich.












