Wir präsentieren unsere Roboter der letzten Saison!
Marl°E und seine Marienkäfer
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
If you accept this notice, your choice will be saved (a Cookie will be set) and the page will refresh.
Wir wollen uns an dieser Stelle vielmals bei unseren Sponsoren und Unterstützern bedanken – Ohne diese wäre unsere gemeinnützige Vereinsarbeit nicht möglich.
Jede Saison lernen wir mehr und mehr und entwickeln uns rapide weiter. Wir freuen uns auf die neue Saison und die Herausforderungen, die sie mit sich bringen wird!
Auch in diesem Jahr hat die TURAG ihr traditionelles Abschlussgrillen veranstaltet. Dies ist sowohl eine Belohnung für unsere Roboterbauer, als auch die Möglichkeit uns persönlich bei unseren Unterstützern zu bedanken. Nach ausführlichen Labortouren und regem fachlichen Austausch konnten sich alle bei zum Glück gutem Wetter und leckerem Essen besser kennenlernen.
Wir haben uns über das zahlreiche Erscheinen von Unterstützern und Alumni gefreut und hoffen auf eine erfolgreiche Eurobot 2025 Saison!
Vom 26.-28. Mai fand der Swiss Eurobot in Yverdon-les-Bains statt. Da wir unsere Fehler, die beim deutschen Eurobot aufgetreten sind, beseitigen konnten und das System nochmal ausreichend testen konnten, sind wir mit viel Zuversicht losgefahren. Unser Pech haben wir jedoch in die Schweiz mitgenommen. Bereits auf der Fahrt ist uns aufgefallen, dass wir unsere Eigenbarke vergessen haben. Diese haben wir früher für unsere Ultraschallsysteme verwendet, brauchen sie jedoch immer noch, um die Größenrichtlinien unseres Roboters einzuhalten. Zum Glück ließ sich das Problem recht gut beheben: ein simples Ersatzteil wurde konstruiert und die Veranstalter in der Schweiz wurden angefragt, ob sie möglicherweise über Nacht einen 3D Druck anwerfen können.
Am Samstag sind wir bereits recht früh zum Veranstaltungsort gefahren und haben unseren Arbeitsplatz eingerichtet. Anschließend wurde sich mit den anderen Teams über die Umsetzung der Aufgaben ausgetauscht und der Veranstaltungsort erkundet.
Als wir unseren Roboter vor der Homologation, in der geprüft wird, ob unser Roboter dem Regelwerk entspricht, angeschaltet haben, ist Unglück Nummer zwei passiert. Die Metallkette von unserem Startstift ist in die Öffnung auf dem Roboter gerutscht und lag auf dem offenliegenden Mainboard. Beim anschalten des Roboters kam es dadurch zu einem Kurzschluss, welchen ein Großteil unserer Elektronik leider nicht überlebt hat. Dadurch wurde der Samstag leider nicht damit verbracht, unseren Roboter fahren zu lassen, sondern damit Kabel umzulöten.
Am Abend waren wir jedoch wieder startbereit! Die meisten Probleme konnten behoben werden. Lediglich der Motortreiber unseres Revolvers konnte nicht repariert werden, wodurch wir nur noch Pflanzen schieben und die Solarzellen drehen konnten.
Obwohl wir so eingeschränkt waren, konnten wir trotzdem gut und zuversichtlich Punkte erzielen und haben bis zu 94 Punkte in einer Runde erreicht (vgl.: 150 Punkte ist ein sehr gutes Ergebnis).
Als schließlich die Finalrunden erreicht waren, haben wir es sogar geschafft, uns ins Mittelfeld durchzukämpfen. Im Finale selbst kam es jedoch schließlich zu Unglück Nummer drei. Unsere Marienkäfer wurden mit Wackelaugen ausgestattet. Eines dieser Augen ist im Finale plötzlich auf das eine Rad gefallen, wodurch einer unserer Schwarmroboter nicht seinen Weg gefahren ist, sondern abgelenkt wurde und in den anderen Marienkäfern gelandet ist. Damit hat für uns leider der Wettbewerb geendet und wir haben mit einem 6. Platz abgeschlossen.
Auch wenn wir damit nicht die erhoffte Platzierung erreicht haben, sind wir sehr stolz darüber, wie gut wir mit den aufgetretenen Problemen umgegangen sind. Wir konnten sehr viel dazulernen und sind als Team enger zusammengewachsen. Mit den neu dazugewonnenen Erfahrungen sind wir zuversichtlich, das die kommende Saison unter dem Motto „The Show Must Go On“ gut meistern werden.
Am Wochenende des 19. – 21. Aprils war es wieder so weit – Nach 6 monatiger Entwicklungszeit dürfen die deutschen Teams das Können Ihrer Roboter unter Beweis stellen. Der Wettbewerb wurde dieses Jahr von Team Mammut in Gießen organisiert und es nahmen insgesamt sechs Teams aus ganz Deutschland teil: 2x Team MAI Robotics aus Markt Indersdorf, der Roboter Club Aachen, Bodensee RobotiX, Team Mammut und natürlich die TU Dresden Robotik AG. Das Ziel? Die Qualifikation für den internationalen Wettbewerb an der Westküste Frankreichs. Nur die top drei Teams aus jedem Land dürfen an diesem teilnehmen und sich gegen die Besten der Besten auf der großen Bühne beweisen.
Für uns lief der Wettbewerb jedoch alles andere als geplant. Der Zusammenbau und die Inbetriebnahme unseres Roboters Marl°E stellten sich schwieriger und zeitintensiver heraus als anfänglich geplant. Zusätzlich haben wir durch kleine Unaufmerksamkeiten einige wesentliche Elemente unseres Roboters wie das Mainboard und die Antriebsplatine mehrfach reparieren/ fertigen und in Betrieb nehmen müssen. Dies führte letztlich dazu, dass wir noch bis Wettbewerb-Samstag 1 Uhr morgens die letzten Softwarekomponenten testeten bevor wir bei Regen und Dunkelheit nach Gießen aufbrachen.
Nachdem unsere letzten Tests am Vorabend erfolgreich waren, sind wir mit großer Zuversicht in den ersten Wettbewerbstag gestartet. Ein essentieller Aspekt für die Teilnahme am Wettbewerb ist die Homologation. Bei dieser wird überprüft, ob der Roboter alle Regeln einhalten und erfüllen kann. Die statische Homologation, also die Überprüfung von Umfang, Safety Features und erlaubten Lasern, lief einwandfrei. Bei der dynamischen Homologation traten jedoch auf einmal die ersten Probleme auf: Unser Roboter reagierte erst viel zu spät auf gegnerische Roboter und schubbste diese somit für kurze Zeiten vor sich weg, bevor er anhielt. Dies ist gegen die Regeln und damit nicht spielzulässig. Genau an dieser Problematik saßen wir am Abend zuvor und dachten eigentlich es gelöst zu haben. Damit konnten wir an den ersten Runden des Wettbewerbes nicht teilnehmen und verbrachten die Zeit mit der Reparatur der Gegnererkennung.
Wir fanden schnell heraus, dass die Kommunikation zwischen unseren Modulen nach der Gegnererkennung bis zu zwei Sekunden braucht. Bei unseren Top-Geschwindigkeiten von bis zu 2 m/s ist dies viel zu langsam. Was jedoch viel schwieriger zu finden war, ist die Ursache für dieses massive Problem. Mit vorranschreitender Zeit und immer größer werdenden Druck wurde es für uns jedoch nicht einfacher: Bei den ganzen Versuchen, die Kommunikationslatenz zu reduzieren, haben wir es geschafft die gesamte Software unseres Roboters lahmzulegen. Am Sonntag um 1 Uhr morgens ging schließlich nichts mehr. Somit wurde sich auf ein Rollback auf den Stand vor der Homologation entschieden, in der Hoffnung mit klareren Köpfen noch einmal die Problematik zu analysieren. Entgegen aller Erwartungen funktionierte dieser eigentlich sichere Stand jetzt jedoch auch nicht mehr. Wir probierten noch bis in den Sonntagmorgen, den Roboter wieder zum Bewegen zu bringen, waren dabei jedoch leider erfolglos.
Die TURAG konnte nicht an den Finalrunden teilnehmen und sich damit auch nicht für den internationalen Wettbewerb qualifizieren. Am meisten enttäuscht sind davon wohl wir selbst. Als Team haben wir über die letzten sechs Monate tausende Stunden Arbeit in Marl°E gesteckt und insbesondere die letzten Wochen alle an einem Strang gezogen, um einen beeindruckenden Roboter präsentieren zu können. Im Endeffekt zählt jedoch nur was zum Wettbewerb funktioniert.
Siegerteam MAI und TURAG
Ein Miserfolg bringt jedoch nicht nur schlechtes mit sich. Dieses Jahr haben wir als Team eine sehr komplexe Aufgabe auf uns genommen, neue Sensorik und Elektronik entwickelt, feinmechanische Konstruktionen gefertigt und unsere Softwarestruktur vielfach erweitert. Jedes unserer Mitglieder hat dieses Jahr seine praktischen Skills stark vorangetrieben und wir sind stolz auf unseren Roboter Marl°E. Vor Allem sind wir motiviert aus unseren Fehlern dieses Jahr zu lernen und arbeiten bereits aktiv daran, dass solche Miserfolge nicht noch einmal passieren und die TURAG auch in der Zukunft wieder auf der internationalen Bühne steht.
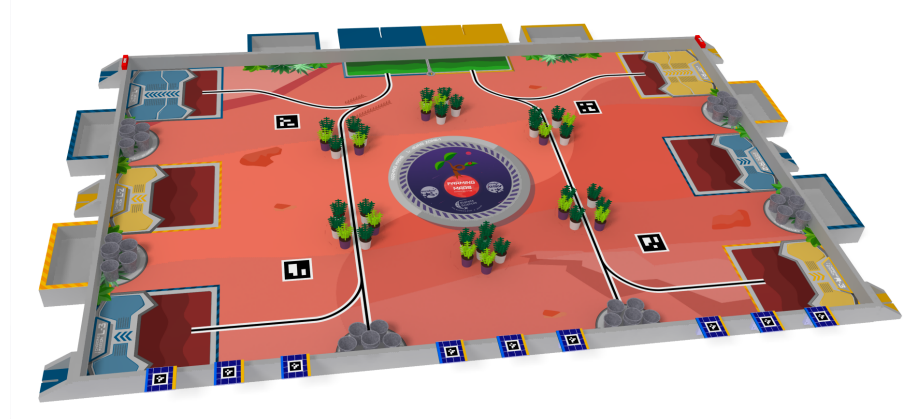
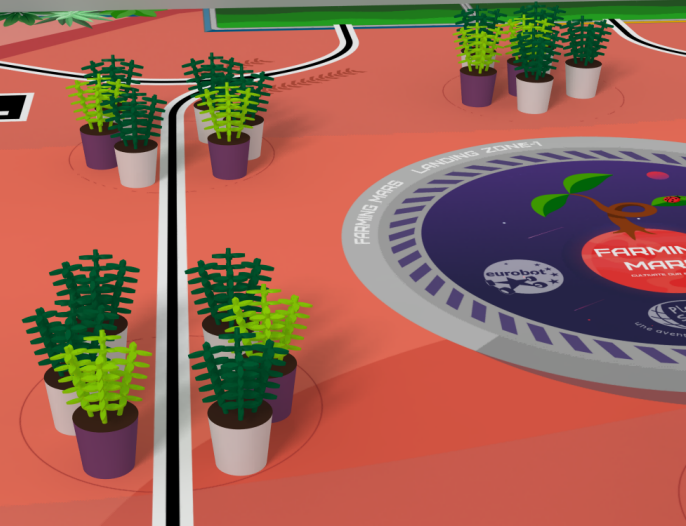
Der diesjährige Eurobot steht unter dem Motto „Farming Mars“. Es ist die Aufgabe der TURAG, den roten Planeten auf die Ankunft der Menschen vorzubereiten und ein Ökosystem aufzubauen.
Um den Mars zu beleben, müssen unsere Roboter dieses Jahr verschiedenste Aufgaben erledigen. Das Hauptaugenmerkt liegt dabei auf der Sicherung der Nahrungs- und Sauerstoffversorgung durch Pflanzen.
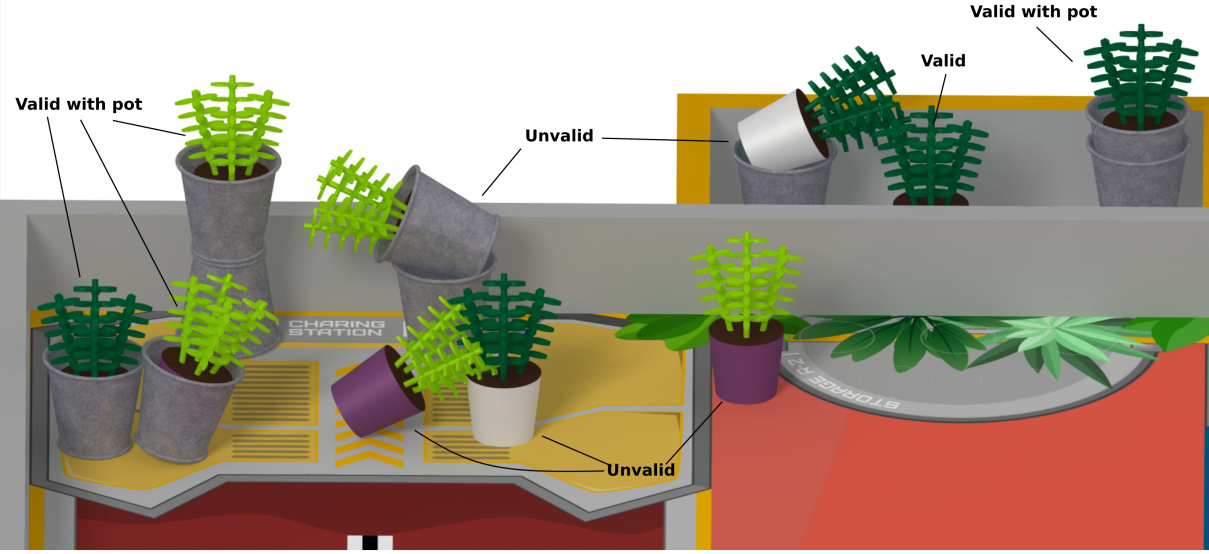
Die Pflanzen müssen zuerst aus verschiedenen Zonen eingesammelt werden, dann in Metalltöpfe gelegt und anschließend in sicheren Zonen ordentlich gelagert werden. Dabei müssen „empfindliche“ Pflanzen (weißer Topf) unbedingt in vorgesehene Gewächshäuser außerhalb des Spielfeldes untergebracht werden. Die Schwierigkeit besteht vor Allem darin, dass sich die Pflanzen anfangs nicht an festgelegten Positionen befinden, sondern im jeweiligen Gebiet zufällig verteilt sein können. Eine Besonderheit dieses Jahr besteht darin, das am Ende des Spieles jedes Team einen Schwarm kleiner Roboter (auch genannt Marienkäfer) auf die Spielfläche loslassen darf. Die Marienkäfer sollen dann die eingetopften Pflanzen bestäuben.
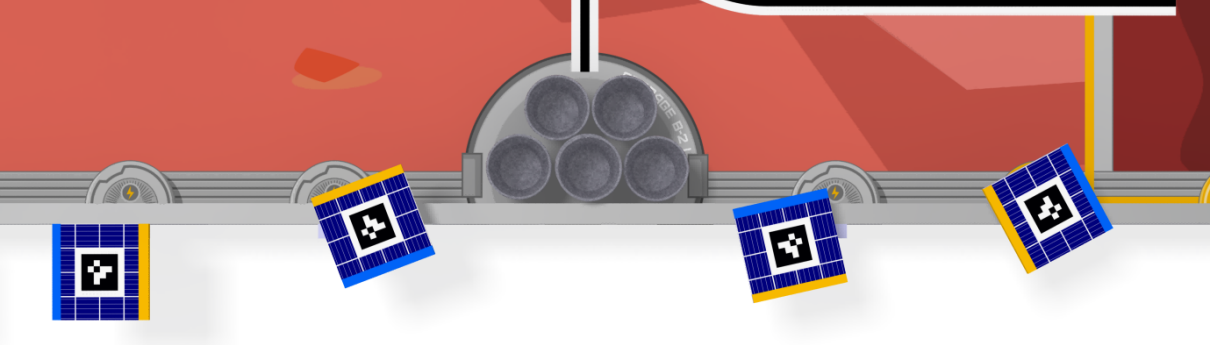
Zusätzlich muss auch noch die Energieversorgung der Mars Basis gesichert werden. Dafür müssen Solarpanele am Rand des Spielfeldes passend ausgerichtet werden.
Die letzten Aufgaben bestehen darin, in einer anderen Basis zu enden, als der Startbasis um dort seine Batterien aufzuladen. Ganz am Ende des Spieles soll der Roboter selber schätzen, wie viele Probleme er erfolgreich gelöst hat und dafür seine erzielten Punkte schätzen. Je besser die Schätzung, desto mehr Zusatzpunkte gibt es.
Die offiziellen Regeln (englische Version) stehen unter folgendem Link zur Verfügung. Dort sind sämtliche Regeln sowie die weitere Reglementierungen detailliert aufgeführt.
Die TURAG fliegt zum Mars! Mit der Veröffentlichung der Eurobot Beta-Spielregeln beginnt für uns die neue Saison unter dem Motto „Farming Mars“. Unsere Roboter werden die Oberfläche des roten Planeten auf die Ankunft der Menschen vorbereiten. Dafür sollen sie Pflanzen eintopfen, transportieren, sortieren und in sichere Gewächshäuser stellen.
Mehr Details zum Wettbewerb folgen mit der Veröffentlichung des finalen Regelwerks.