
 Es soll ein System zum Lokalisieren von ArUco Markern aufgebaut werden.
Es soll ein System zum Lokalisieren von ArUco Markern aufgebaut werden.
Zusammenfassung
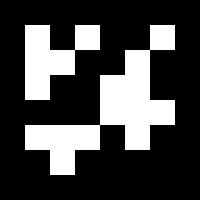
In den neusten Eurobotregeln wurde ein neues System zur Objekterkennung eingeführt: ArUco Marker [1]. Diese können benutzt werden um die Position und Orientierung von Spielelementen herauszufinden oder sogar Gegner zu erkennen. Daher soll ein wiederverwendbares System zum Erkennen und zur Positionserfassung dieser Marker implementiert werden. Im Roboter kann dazu einen Webcam an den Hauptrechner angeschlossen werden, deren Bilder in einem ROS-Node [2] ausgewertet werden sollen.
Es ist nach Regelwerk außerdem zulässig ein zusätzliches Erkennungssystem über dem Spielfeld zu montieren. Dafür müsste ein Haltesystem konstruiert und geeignete Hardware zur Bildverarbeitung und Kommunikation (z.B. RapsberryPi) ausgewählt werden.
Aufgaben
- Einarbeitung in ArUco und geeignete Bibliotheken
- Implementierung eines Systems mit Kamera im Roboter
- zusätzlich: Aufbau eines zentralen Erkkenungssystems
Tools
- Programmiersprache nach Wahl
- Robot Operating System (ROS)
- SolidWorks CAD
Links
[1] https://docs.opencv.org/trunk/d5/dae/tutorial_aruco_detection.html
[2] http://wiki.ros.org/aruco