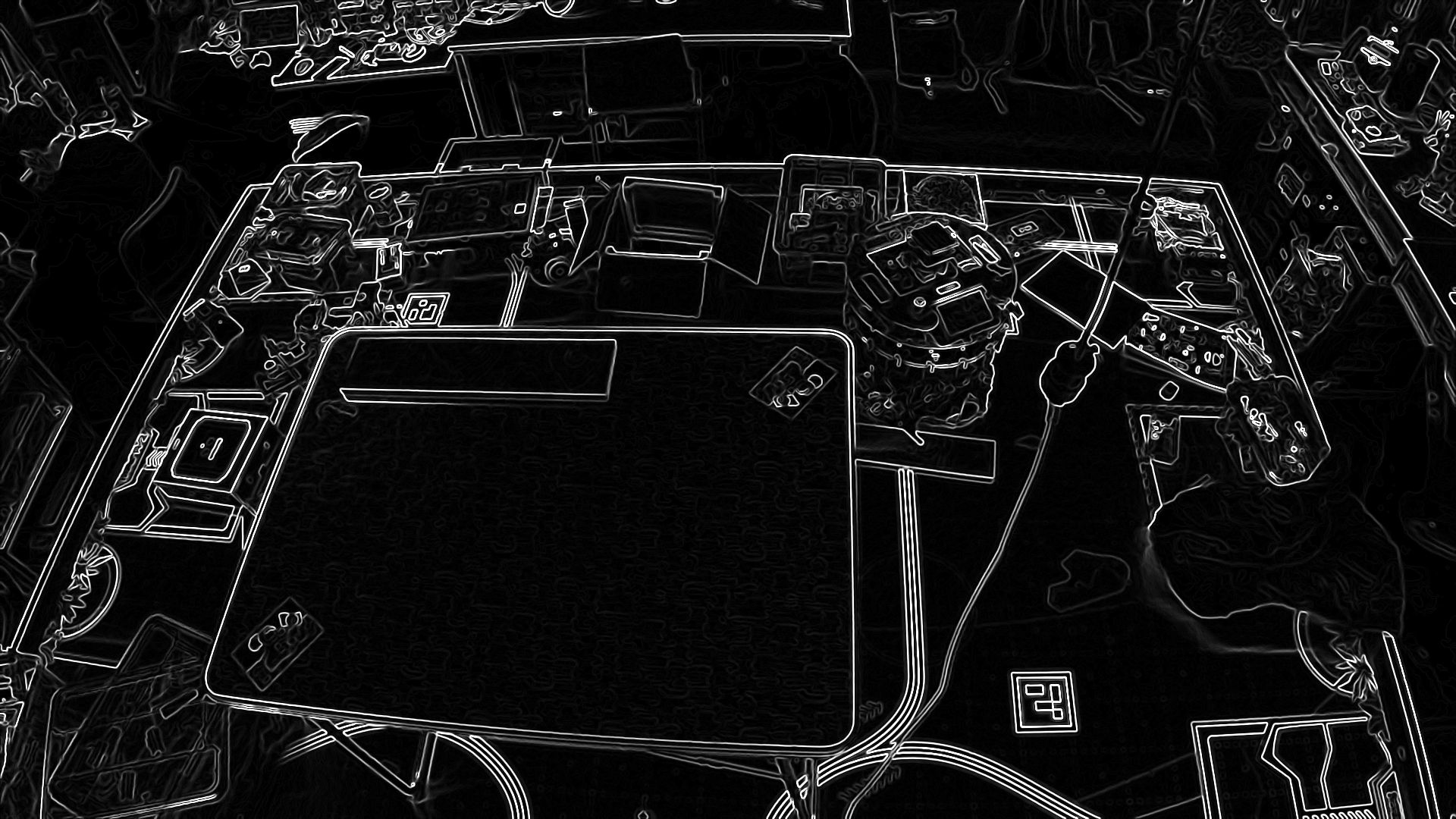
Um alle Ereignisse auf dem Wettbewerbsspielfeld zu erfassen und den gegnerischen Roboter zu lokalisieren, nutzen wir ein Kameratracking-System. Dieses besteht aus einem ~1.60m hohen Turm auf dem eine Luxonis Oak W Kamera montiert ist. In der vergangenen Saison haben wir diese bereits genutzt um den Gegner zu tracken und neuerdings auch, um Objekte mit Hilfe von edge detection zu klassifizieren.
Eine Kamera reicht jedoch nicht ganz, um das gesamte Spielfeld abzudecken. Aus diesem Grund soll probiert werden zwei Kameras gleichzeitig zu nutzen, deren Bilder miteinander kombiniert werden. Auf Grundlage des kombinierten Bildes können dann Ereignisse im gesamten interessanten Bereich beobachtet werden. Wichtig ist hierbei insbesondere die Qualität des Merges und damit die Minimierung von Verzerrung, aber auch eine gute Performance.