Konstruktion einer möglichst kompakten gefederten Kugelrolle.
Zusammenfassung
Unsere Roboter verfügen über zwei Antriebsräder und stützen sich zusätzlich auf Kugelrollen [1] ab. Für größere Aktoren in der Nähe des Bodens sind diese Rollen oft zu sperrig. Kompakte und in sich gefederte Kugeln sind verfügbar [2] aber bisher noch nicht getestet. Wichtig ist, dass die Kugelrolle trotz kompakter Bauform nicht zu klein wird, um Unebenheiten im Boden ausreichend ausgleichen zu können. Die Steifigkeit der Federung solle möglichst einfach anpassbar sein, damit je nach Fahrverhalten des Roboters nachjustiert werden kann.
Ziel dieses Projekts ist der Aufbau einer kompakten Kugelrollen-Baugruppe mit Federung und einfacher Schnittstelle zur Montage im Roboter.
Aufgaben
Recherche zu möglichen Komponeneten oder fertigen Lösungen
Wir präsentieren unsere Roboter der Eurobot-Saison 2025!
Guido und seine SIMAs
Please accept YouTube cookies to play this video. By accepting you will be accessing content from YouTube, a service provided by an external third party.
If you accept this notice, your choice will be saved (a Cookie will be set) and the page will refresh.
Hinter allen unseren Robotern stecken tausende Stunden Arbeit: vom Prototyping über die Inbetriebnahme bis hin zum finalen Ergebnis beim Wettbewerb. Wir sind sehr stolz auf das diesjährige Ergebnis und hoffen, dass wir das neuerlangte Wissen in der kommenden Saison gut anwenden können.
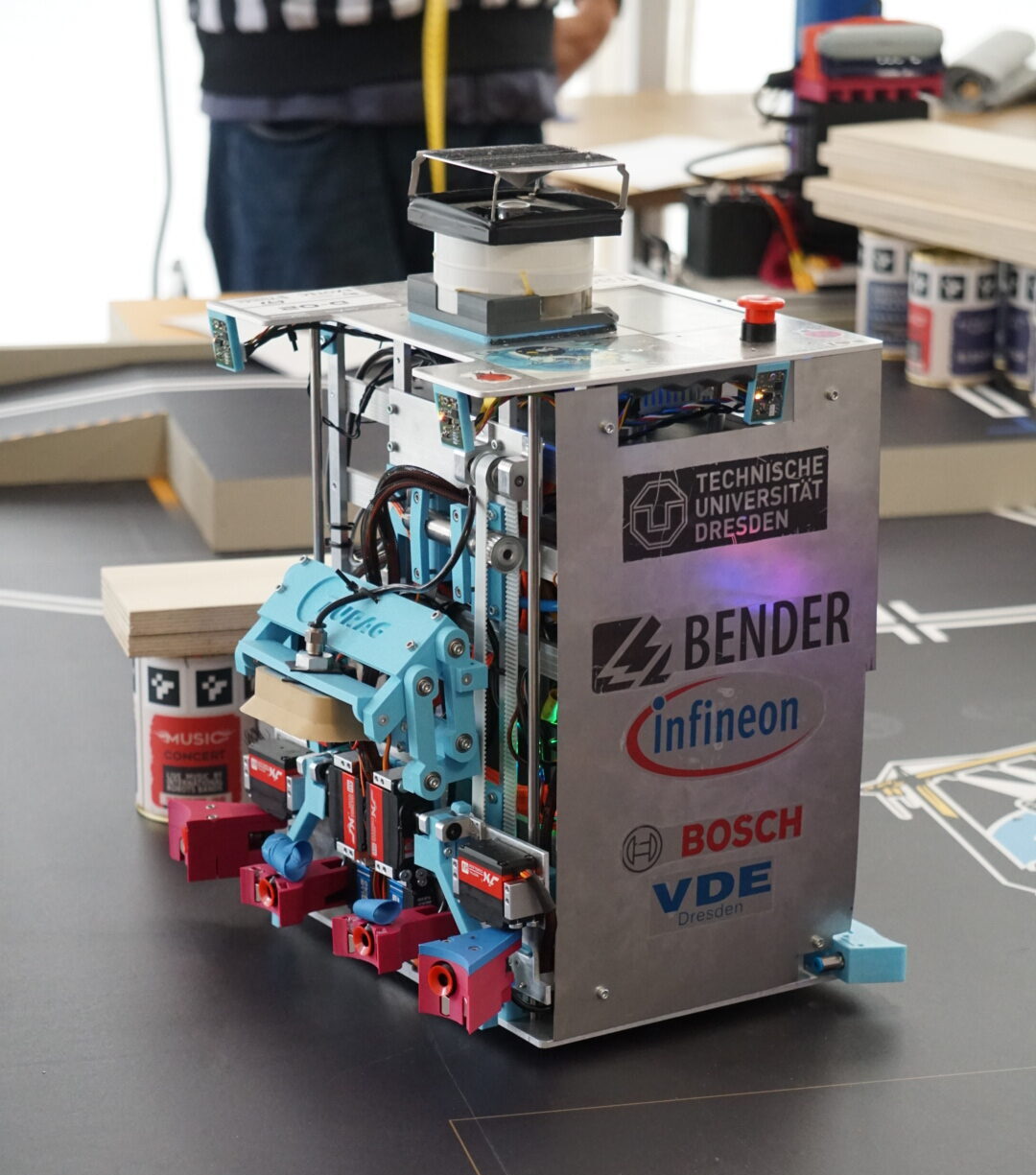
Guido (vorne)
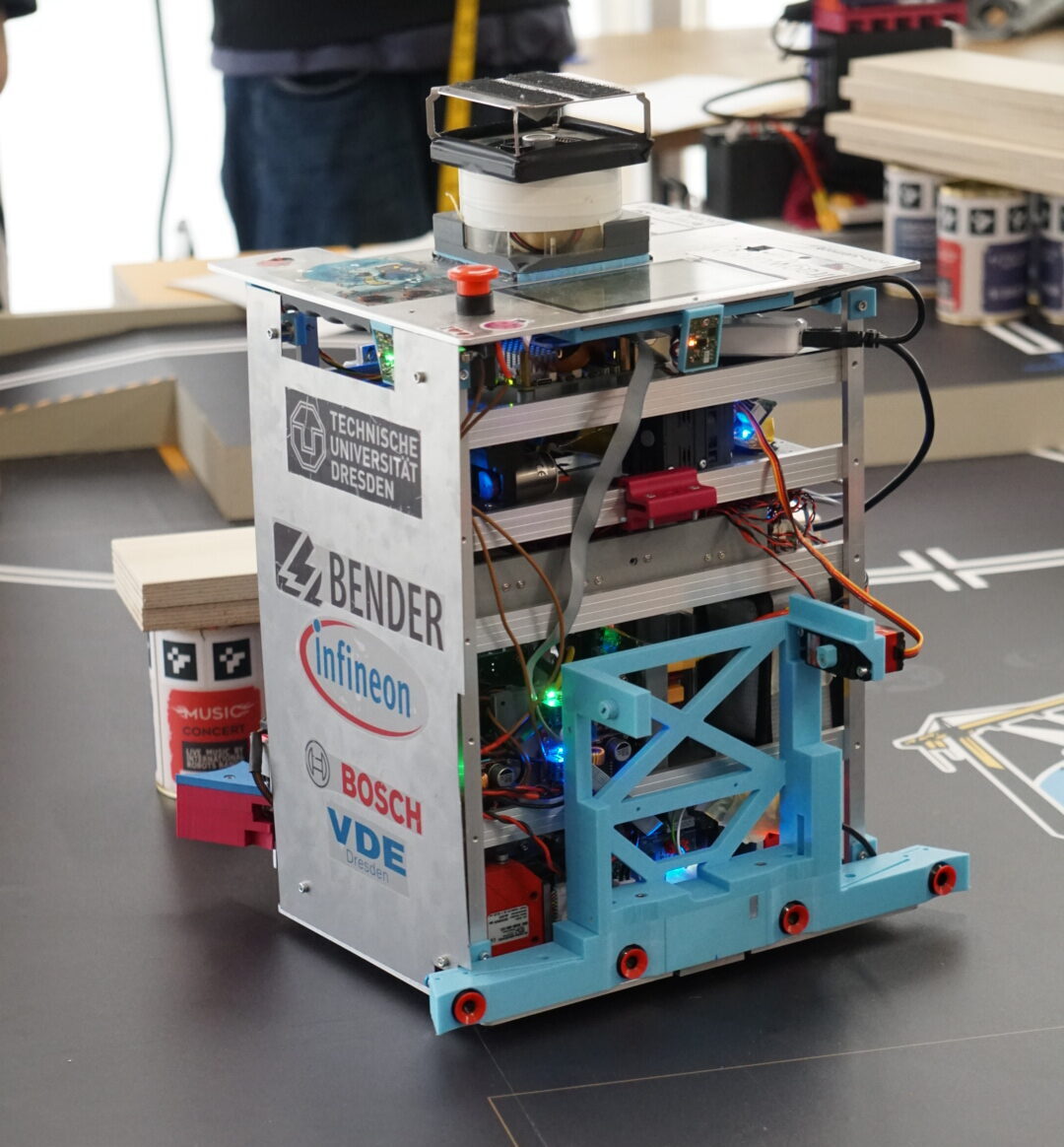
Guido (hinten)
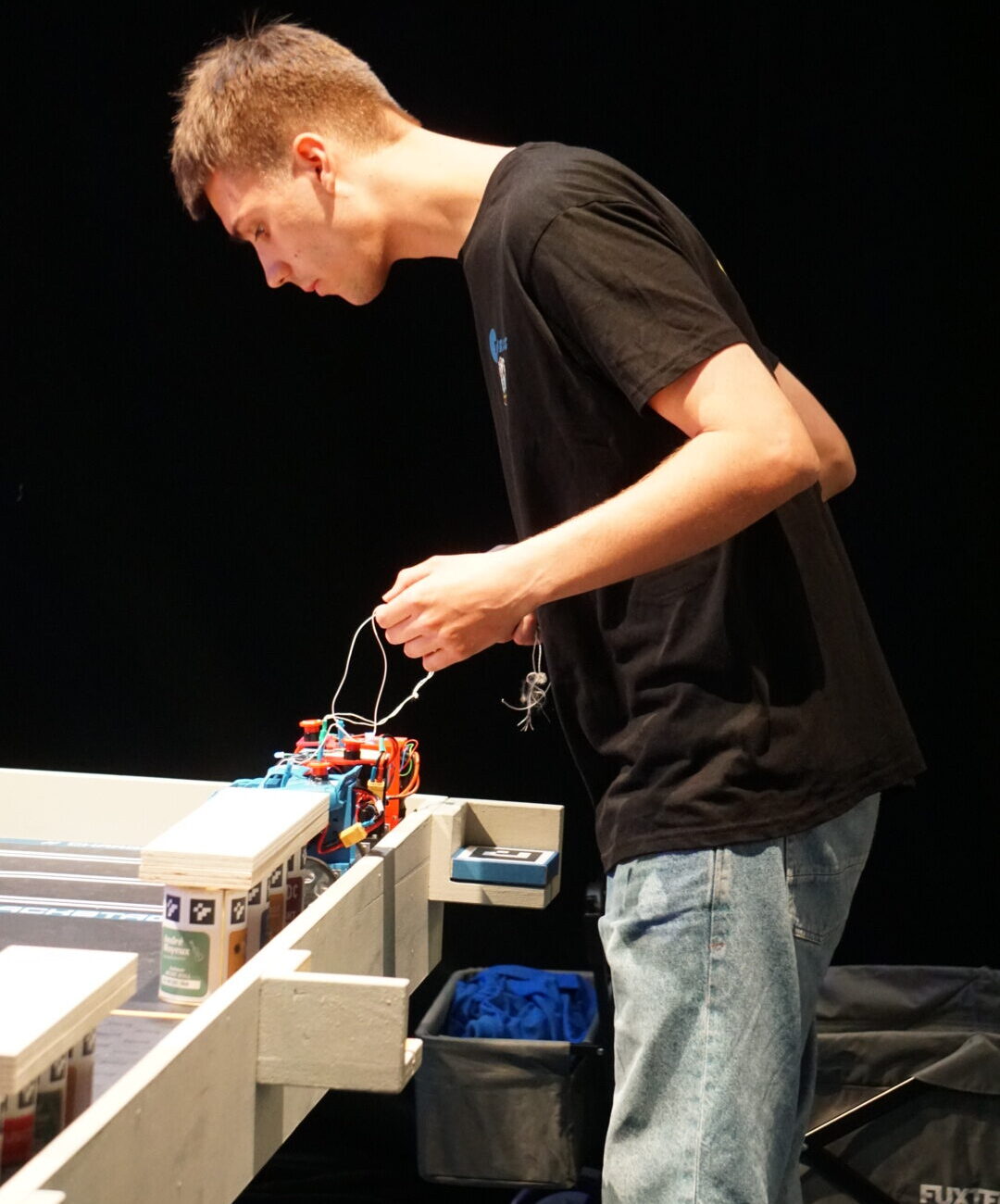
Setup der Groupies
Siegerehrung
Vielen Dank an unsere Sponsoren Bender Engineering, Infineon, Global Foundries, Bosch Sensortec und VDE Dresden !
Sie ermöglichen es, dass wir uns in unserer Freizeit praktisch weiterbilden und unser Wissen an die nächste Generation von Ingenierstudenten weitergeben können. Ohne sie wäre unsere gemeinnützige Vereinsarbeit nicht möglich.
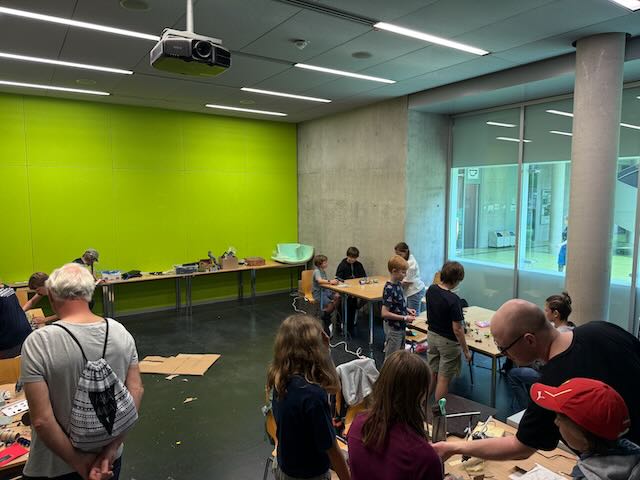
Für unser Team gehört die Weitergabe unseres Wissens und unserer Begeisterung für die Technik ganz klar mit dazu! Deshalb haben wir dieses Jahr einen Wettbewerb organisiert, bei dem Schüler*innen aus Dresden und Umgebung eigene kleine Roboter bauen konnten.
ScrapBot-Teilnehmer*innen und Betreuerin
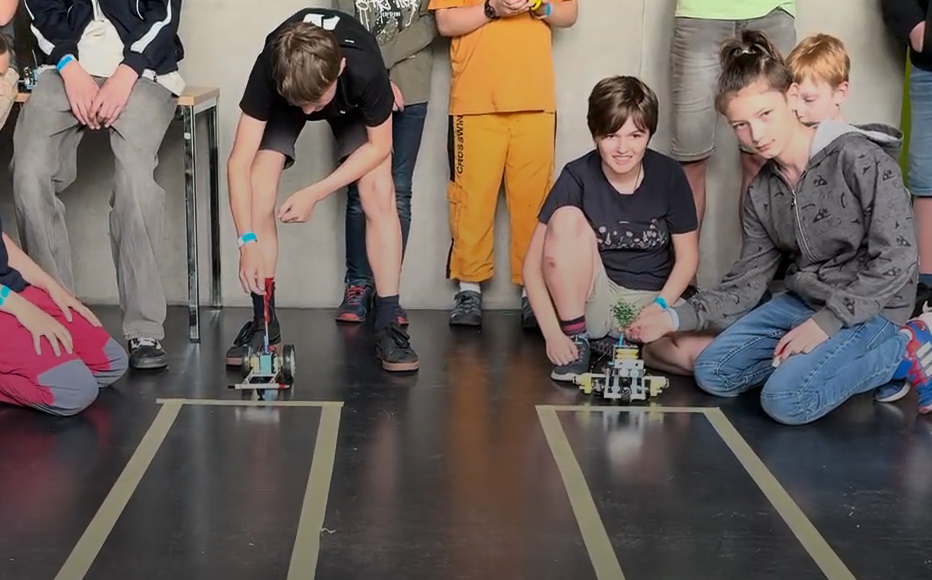
Innerhalb von drei Stunden haben die 27 Schüler*innen in Dreierteams aus einem Batteriepack, zwei Getriebemotoren und ganz viel Bastelmaterial versucht die Aufgabe zu lösen: geradeaus zu fahren, ohne die markierte Zone zu verlassen und als erstes im Ziel anzukommen. Nach Verkündung der Aufgabe folgte erst einiges Schmunzeln: das Ganze sei doch viel zu einfach und man bräuchte doch niemals die vorgegebene Zeit. Nach der ersten Stunde und einigen Tests wurde jedoch festgestellt: ein bisschen Knobelei gehört doch dazu und der Erfindergeist wurde in den Köpfen geweckt. Verschiedene Arten von Rädern wurden ausprobiert, verschiedene Gewichte und Strategien. Während manche versucht haben, das Gewicht leicht und den Roboter klein zu halten, um möglichst schnell im Ziel anzukommen, um sich Fehler erlauben zu können, haben andere lieber auf „Slow and Steady“ gesetzt.
Eine von zwei Bastelzonen
Am Ende hatten die neun Teams Roboter, die genau so unterschiedlich waren, wie die Teamnamen- ein großer Roboter beim Team „The Big Glitter Wheels“ bis zum minimalgroßen Roboter der „Robocops“
Wettbewerb
Nebenbei wurde außerdem der nationale Eurobot-Wettbewerb abgehalten- die Schüler*innen konnten also nicht nur selbst basteln, sondern uns und den anderen Eurobot-Teams bei Siegen, Niederlagen und natürlich ganz viel beim tüfteln zuschauen.
Vielen Dank an die Hochschulgruppe Turmlabor, die beim Betreuen und Basteln geholfen hat!
Nach vielen arbeitsintensiven Monaten war es endlich wieder so weit: TURAG reist mal wieder nach Frankreich – genauer gesagt nach „La Roche-sur-Yon“. Insgesamt 15 Teammitglieder machten sich am späten Nachmittag auf den Weg von Dresden Richtung Westen. Die Stimmung in den Autos war erwartungsvoll und optimistisch, trotz der langen Fahrt. Für die eine Hälfte des Teams gab es am Abend noch einen kurzen Zwischenstopp beim McDonald´s, für die andere bei Burger King – hier sieht man mal wieder ein Paradebeispiel für die Kommunikation zwischen angehenden Ingenieuren.
Start in Dresden
Mittwoch, 28.05.2025
Gegen 9 Uhr morgens erreichten wir unser Ziel. Nach einer kurzen Wartezeit bei der Anmeldung konnten wir in die Halle und direkt mit dem Aufbau unseres Standes beginnen. Trotz der Müdigkeit vom Vortag herrschte eine fröhliche Stimmung. Das sonnige Wetter lud zum Frühstücken unter freien Himmel ein, mit frischem französischem Gebäck und Obst vom naheliegenden Supermarkt.
Einige Teammitglieder nutzten die sich bietende Gelegenheit ein paar ruhige Minuten in den leeren Autos zu verbringen, um ein wenig Energie aufzutanken. Andere begannen mit der Reparatur beschädigter Teile oder löteten an den letzten SIMAs. Neben der intensiven Arbeit am Roboter blieb trotzdem Zeit für einen Rundgang durch die Halle, bei dem wir viele bekannte Gesichter und Teams der vergangenen Jahre wieder getroffen haben.
Erfolgreiche Homologation
Ein wichtiger Meilenstein des Tages: Die erfolgreiche Homologation unseres Roboters. Damit darf dieser offiziell beim Wettbewerb fahren.
Am späten Nachmittag ging es dann endlich in unsere Unterkünfte. Nach einem wohlverdienten Abendessen tüftelten einige Teammitglieder in der Unterkunft noch bis spät in die Nacht am Roboter. Für vier ging es jedoch nochmal zum Wettbewerbsstand, um die nun endlich fertigen SIMA-Roboter zu homologieren und den Abend im Gespräch mit den anderen Teams ausklingen zu lassen.
SIMA-Nachtschicht
Donnerstag, 29.05.2025
Früh im morgen stand für uns gegen 12:00 Uhr das erste Spiel gegen „TALEB.BOT“ aus Algerien (Turag vs. Taleb.bot) auf dem Programm. Die Feuertaufe für unseren Roboter – mit einem holprigen Auftakt in den Wettbewerb.
Im Anschluss ging es mit unseren Turexen und Musik auf Erkundungstour durch die Halle. Ziel war es, möglichst viele Teams kennenzulernen und natürlich so viele Sticker wie möglich zu tauschen. Dabei durften wir sogar einige unserer Aufkleber direkt auf den Bots anderer Teams verewigen – im Gegenzug wurde eine ganze Seitenwand unseres Roboters mit Teamlogos aus aller Welt geschmückt.
TURAG auf den Weg zu anderen Teams
Am Nachmittag traten wir zu unserem zweiten und letzten Spiel des Tages an – diesmal gegen das belgische Team „Monsymphony“ (Turag vs. Monsymphony). Eine solide Partie mit 72 Punkten, bei der wir leider feststellen mussten, dass unsere Magnete am Bot zu stark waren. Hieß für uns: ran an die Inbus-Schlüssel und anpassen.
Am Abend dann die unerfreuliche Nachricht: Zwei unserer SIMAs ließen sich plötzlich nicht mehr ansprechen und der Roboter wollte optimiert werden. Mit diesem Handycap in Gedanken ging es für uns in die allseits bekannte Nachtschicht. Mit der Hoffnung so viel wie möglich aus unserem Bot und den SIMAs herauszuholen, wurden Teile ausgetauscht, neu verkabelt und verlötet.
Altbekannte Nachtschicht
Freitag, 30.05.2025
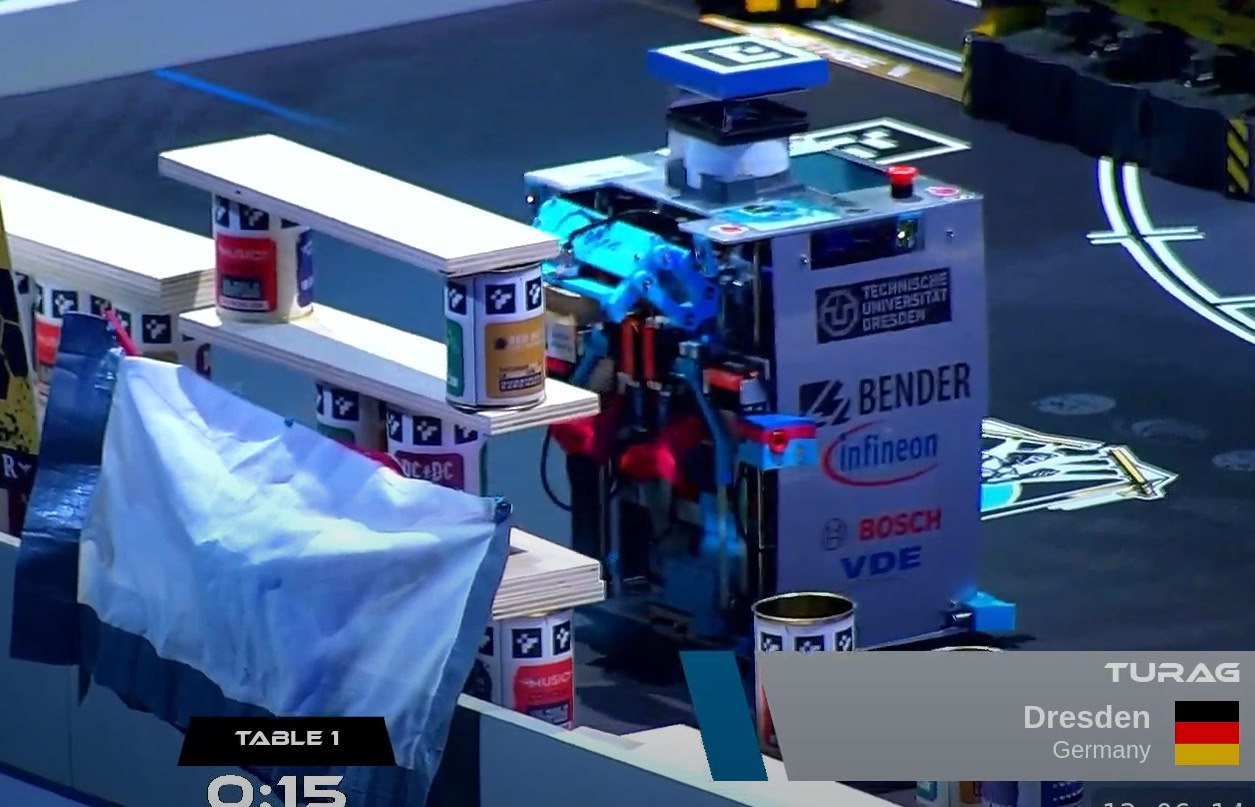
Der Tag startet direkt mit einem spannenden Spiel gegen das serbische Team „FTN-ELECTROPIONEER“ (Turag vs. FTN-Electropioneer). Mit viel Konzentration und einer gelungen Strategie gelang es uns eine erfolgreiche Dreier-Tribüne aufzubauen. Das für uns beste Spiel bei dem Wettbewerb.
TURAG baut Dreier-Tribüne
Nach dem Spiel gönnten wir uns eine wohlverdiente Pause am Strand. Das sonnige Wetter, leckere Baguettes, die entspannte Atmosphäre und die Möglichkeit im Sand zu spielen boten einen Ausgleich, den wir dringend gebraucht haben.
Frisch gestärkt und ausgeruht ging es für uns am späten Nachmittag zurück zur Halle, wo das letzte Spiel des Tages anstand: Turag vs. Gramme’n Roll aus Belgien. Trotz einiger technischer Einschränkungen – unter anderem hat der SIMA sein Ziel nicht erreicht – gelang es uns erneut der Aufbau einer stabilen Dreier-Tribüne. Damit konnten wir erneut wertvolle Punkte einfahren.
Den Abend verbrachten wir bei einem gemeinsamen Grillabend mit den anderen Teams. Beim anschließenden Coup-Off, einer Art inoffiziellen Tournier-Abschluss mit Musik, kleinen Challenges und Showeinlagen, konnten wir den Tag mit einigen neuen Kontakten ausklingen lassen.
TURAG mit Turexen
Samstag, 31.05.2025
Der letzte Wettbewerbstag begann mit gemischten Gefühlen. Einerseits lag ein intensives, erfolgreiches Event hinter uns, andererseits lief unser letztes Spiel nicht nach Plan – Turag vs. Polybot aus Algerien. Das Match begann für beide Seiten nicht optimal durch unerwartete technische Probleme. Dennoch gelang es uns, mit 41 Punkten den Sieg zu sichern – ein siegreicher Abschluss für unsere diesjährige Saison. Jedoch reichte die Summe unsere Punkte nicht aus um uns für die Finalrunden zu qualifizieren.
Nach dem Spiel nutzten wir die verbleibende Zeit, um noch einmal an den Strand zu fahren. Dort sammelten wir nicht nur Muscheln und Sonnenstrahlen, sondern auch noch ein letztes Stück Ruhe vor dem großen Finale.
TURAG am Strand
Weitere Bauarbeiten am Strand
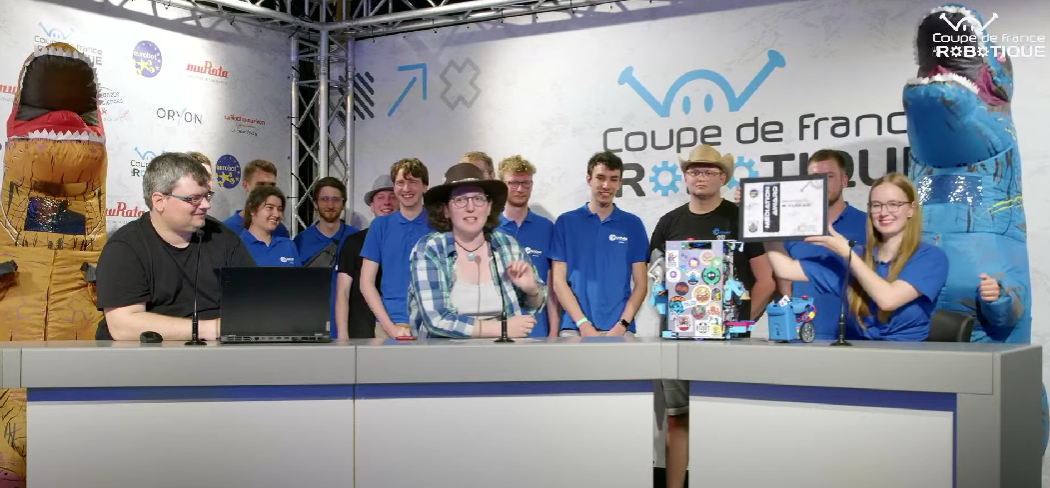
Am Abend stand dann das feierliche Finale des Wettbewerbs auf dem Programm. Für uns gab es dabei einen besonderen Grund zur Freude: Die TURAG wurde für ihr Engagement im Bereich der Nachwuchsförderung ausgezeichnet. Unsere zahlreichen Workshops, Schulbesuche und Events, bei denen wir Schüler*innen für Technik und Robotik begeistern, wurden damit offiziell gewürdigt. Eine große Ehre und Motivation, auf diesem Weg weiterzumachen.
Siegerehrung
Nach dieser Preisverleihung verfolgten wir das spannende Finale zwischen den besten Teams des Turniers – eine beeindruckende Show. Anschließend kehrten wir müde, aber glücklich in unsere Unterkunft zurück. Dort begannen wir mit dem Packen und den Vorbereitungen für die Rückreise – im Gepäck viele neue Eindrücke, Erfahrungen und natürlich Sticker.
Team MAI & TURAG
Sonntag, 01.06.2025
Nach diesem aufregenden Wochenende startete unsere Rückreise 6 Uhr morgens. Nach einer entspannten, ruhigen Fahrt mit guter und witziger Musik erreichten wir Dresden gegen 20:45 Uhr. Nach der langen Fahrt wurde das Material zügig ausgeladen und im Keller verstaut.
Müde, aber zufrieden können wir alle auf viele neu gewonnene Erfahrungen, wertvolle Erkenntnisse und eine gelungene Zeit in Frankreich zurückblicken
Dresden, Anfang Mai: Nach monatelanger Vorbereitung war es endlich so weit – wir durften den deutschen Eurobot 2025 nicht nur mit unserem Roboter Guido bestreiten, sondern auch selbst als Gastgeber ausrichten. Die Spannung war groß, die To-do-Listen noch größer – aber mit vereinten Kräften haben wir ein intensives, herausforderndes und großartiges Event auf die Beine gestellt.
In den Andreas-Pfitzmann-Bau der TU Dresden luden wir fünf Teams aus ganz Deutschland ein, die um die Teilnahme am internationalen Wettbewerb kämpften – und natürlich auch um Ruhm, Ehre und jede Menge Robotik-Erfahrung. Mit dabei waren:
Bodensee RobotiX (Konstanz)
Die DOsen Stapler (Augsburg) – ein neues Team mit viel Potenzial
MAI Robotics (Markt Indersdorf )
M.A.M.U.T (Gießen)
RoboterClub Aachen (Aachen)
TU Dresden Roboter AG (Dresden)
Früher Erfolg trotz später Nächte
Am Samstag, den 3. Mai, stand die Homologation an – der technische Check, bei dem geprüft wird, ob ein Roboter regelkonform ist und überhaupt zum Wettbewerb antreten darf. Hier werden Maße, Sicherheitsfeatures und Sensorik überprüft sowie ein erster Funktionstest durchgeführt. Hier konnten wir direkt einen Erfolg verbuchen: Unser Roboter Guido war der erste, der fehlerfrei homologiert wurde. Ein Moment, der uns sehr stolz gemacht hat, vor allem nach all den Wochen voller Prototyping, Debugging und Nachtschichten.
Auch MAI Robotics und Bodensee Robotics zeigten sich früh einsatzbereit. Die Teams RCA, DDOS und M.A.M.U.T hatten zunächst mit technischen Startschwierigkeiten zu kämpfen – meisterten diese aber mit viel Engagement und Teamgeist.
Zwischen Euphorie und Elektronikfehlern
Unser Roboter Guido, benannt nach dem kleinen Gabelstapler aus Cars, sollte in diesem Jahr von kleinen SIMAs flankiert werden – angelehnt an Mia und Tia. Leider war der Großteil unsere SIMAs zum deutschen Eurobot noch in der Verkabelung, sodass sie in den Matches nicht einsatzbereit waren. Immerhin schaffte es unser „Superstar“ Lightning McQueen aufs Spielfeld wenn auch als Kabelmonster.
Auch wenn die SIMA’s nicht in ihrer vollen Pracht erscheinen konnten, möchten wir euch nicht vorenthalten, wie die SIMAs eigentlich gedacht waren.
SIMA-Entwurf
Dank unserer TOF-basierten Gegnererkennung konnte Guido im Match zuverlässig auf andere Roboter reagieren – ein System, auf das wir besonders stolz sind. Leider machte uns jedoch die LMC-Bridge des Antriebs immer wieder einen Strich durch die Rechnung. Plötzliche Ausfälle und inkonsistentes Fahrverhalten kosteten uns wertvolle Punkte und verhinderten, dass Guido sein volles Können zeigen konnte.
Ein kleines Highlight – mit unerwarteter Nebenwirkung: In einer Last-Minute-Aktion konnten wir unser Team-Banner noch auf der Testplatte am Spielfeldrand platzieren und waren gespannt, es auch im deutschen Finale zur Geltung zu bringen. Leider funktionierte das Ganze im Spielbetrieb nicht wie geplant – das Banner behinderte die Fahrt, sodass der Roboter nicht wie geplant weiterfahren konnte.
Rückblick mit Stolz und klarem Blick nach vorn
Auch wenn nicht alles nach Plan lief, war der Eurobot 2025 für uns ein großer Erfolg – sowohl als Gastgeber als auch als Teilnehmer. Besonders stolz sind wir darauf, dass wir es trotz technischer Hürden und spontanem Feinschliff am Ende auf den 3. Platz geschafft haben! Dieser Podiumsplatz ist für uns eine starke Bestätigung unserer Arbeit und Motivation, in Zukunft noch weiter vorne mitzufahren.
Den 1. Platz sicherte sich in diesem Jahr Bodensee RobotiX – mit einem beeindruckend stabilen Setup, cleverer Strategie und viel Erfahrung. Team MAI Robotics folgte dicht dahinter auf dem 2. Platz und überzeugte mit technisch ausgereiften Lösungen und starker Teamleistung und den einzigen 2er Tribünen bis dato. Beide Teams haben sich ihren Platz im internationalen Wettbewerb redlich verdient!
Bodensee Robotics – Erstplatzierte beim Eurobot 2025
Team MAI Robotics – Zweitplatzierte beim Eurobot 2025
Wir haben gesehen, was funktioniert – und was noch verbessert werden muss. Besonders im Nachhinein wissen wir: Die Fertigstellung des Hauptroboters hätte deutlich früher erfolgen müssen. Dieses Potenzial konnten wir später beim internationalen Wettbewerb größtenteils ausspielen, wo Guido in voller Stärke antreten konnte und 3er-Tribünen auf dem Spielfeld verteilte.
Wir danken allen Teams für faire Matches, allen Helfer*innen für ihren Einsatz – und unserem eigenen Team für Motivation, Technikleidenschaft und Teamgeist.
Wir freuen uns schon jetzt auf den Eurobot 2026 – mit neuen Ideen, neuen Herausforderungen und einem hoffentlich weniger anfälligenAntrieb.
Du interessierst dich für Technik und möchtest mal herausfinden, wie ein Ingenieur denkt? Am 3. und 4. Mai kannst du in die Welt der Robotik eintauchen! Neben coolen Projekten von unserer Universität, wie zum Beispiel Roboterhunden, kannst du beim nationalen Eurobot-Wettbewerb zuschauen. Hierbei treten Teams aus ganz Deutschland mit ihren Robotern gegeneinander an und versuchen so schnell wie möglich verschiedene Aufgaben auszuführen.
Nur zuschauen ist jedoch langweilig! Am 3. Mai kannst du selbst aktiv werden und deinen eigenen Roboter im Rahmen der ScrapBot-Challenge bauen.
Und keine Angst: Du benötigst keine Vorerfahrungen oder besonderes technisches Wissen – du erlernst alles was du benötigst spielerisch vor Ort.
Was ist die ScrapBotChallenge?
Bei der ScrapBot-Challenge könnt Ihr und euer Team selbst kreativ werden und aus Pappe, Heißkleber, zwei Motoren und was euch sonst noch einfällt einen eigenen Roboter bauen. Dieser wird im Anschluss in einer Challenge gegen die anderen Teams antreten. Die Challenge verraten wir euch jedoch erst vor Ort, damit niemand einen Vorteil hat.
Wie funktioniert die Challenge?
Melde dich entweder einzeln oder in einem Team an. Bei einer Einzelanmeldung werden wir dir vor Ort deine Teamkameraden vorstellen
Von 10:00 Uhr bis 13:00 Uhr könnt ihr alle Materialien vor Ort nutzen, um euren ScrapBot zu bauen. Ihr könnt jederzeit eine Mittagspause einlegen und euch stärken.
Tretet in einer Challenge gegen die anderen Teams an und kämpft euch zum ScrapBot-Meister hoch!
Um Verpflegung vor Ort sowie Bastelmaterialien kümmern wir uns! Ihr könnt jedoch gerne kleine Figuren o.ä. mitbringen, um euren Roboter zu verschönern.
Für jeden Teilnehmer wird es am Ende eine Teilnahmeurkunde sowie einen kleinen Goodiebag geben! Außerdem dürft ihr eure Roboter als Andenken auch mit nach Hause nehmen.
Wie läuft das Robotik Wochenende ab?
3. Mai:
Von 11:00 Uhr bis 18:00 Uhr könnt ihr den Eurobot-Teams bei den Vorrunden zuschauen, bei denen die Roboter erstmals gegeneinander antreten.
Von 10:00 Uhr bis 15:00 Uhr findet parallel die ScrapBot-Challenge statt – inklusive großem Finale und Siegerehrung im Anschluss!
Von 10:00 Uhr bis 18:00 Uhr könnt ihr einige Robotik-Projekte unserer Fakultät bewundern und euch im ASCII-Cafe im Gebäude Getränke und kleine Stärkungen holen.
Für eine Mittagsverpflegung sorgen wir zwischen 11:30 Uhr und 13:30 Uhr.
4. Mai:
15:00 Uhr bis 16:30 Uhr könnt ihr beim Finale des deutschen Eurobots zuschauen! Hierbei kämpfen die Teams um die Qualifikation für den internationalen Eurobot Wettbewerb.
Anmeldung:
Bitte melde dich unter einem der folgenden Links an. Jedes Team besteht aus drei Personen:
Dieses Jahr findet der Deutsche Eurobot-Wettbewerb in Dresden organisiert von der TURAG statt. Der Wettbewerb dient als nationaler Vorentscheid zur Auswahl, welche drei Robotik-Teams sich für den internationalen Eurobot qualifizieren.
Neben dem Eurobot findet zusätzlich die „Scrap-Bot-Challenge“ für Schüler:innen statt und es werden interessante Robotikprojekte der Fakultät vorgestellt.
Interessierte Besucher und Roboterfreunde sind gerne gesehen. Vorbeikommen lohnt sich! 🙂 Es wird auch eine Livestream auf dem Youtube-Kanal der TURAG geben.
Wann? 02. bis 04. Mai 2025
Wo? Andreas-Pfitzmann-Bau, TU Dresden, Nöthnitzer Str. 46, 01187 Dresden
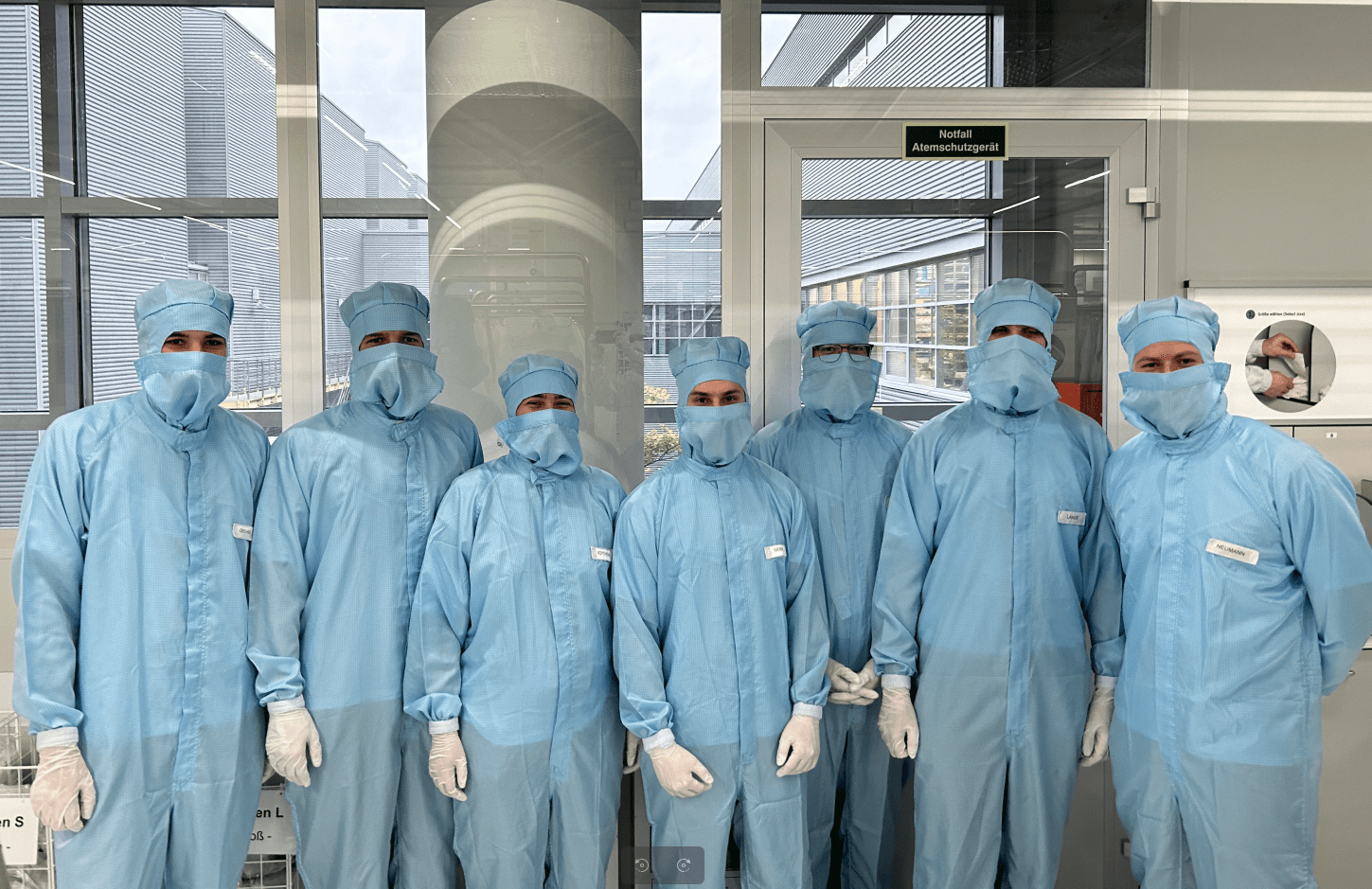
Seit diesem Jahr arbeiten wir mit unserem Sponsor Infineon Dresden zusammen. Im Rahmen unserer Kooperation wurden wir eingeladen, spannende Einblicke in die Firma und die Arbeit als Automatisierungsingenieur in der Halbleiterindustrie zu gewinnen.
Das größte Highlight war für uns die Führung durch die Reinräume der 200mm und 300mm Waferproduktion. Weil die Türen des Reinraumes sehr wenigen Menschen offen stehen, war dies eine ganz besondere Möglichkeit. Erst nach mehreren Schichten Schutzkleidung, um die Verschmutzung der Produktionshallen zu verhindern, ging es für uns in die Fab. Mitten zwischen zahlreichen autonom arbeitenden Robotern, wurde uns der Aufbau der Anlage und die verschiedenen Prozessschritte erklärt. Bei jedem „falschen“ Schritt, wurde man von Robotern angepiepst, die an einem vorbei wollten. Es wirkte alles fast unrealistisch und utopisch.
Am Ende der Veranstaltung konnten wir uns bei Getränken und Kuchen mit Ingenieuren und Projektleitern aus verschiedenen Abteilungen vernetzen und über mögliche Berufswege und Aufgaben bei Infineon austauschen.
Wir waren von diesem Ausflug sehr begeistert und freuen uns darauf, auch in Zukunft weiter mit Infineon zusammenzuarbeiten.
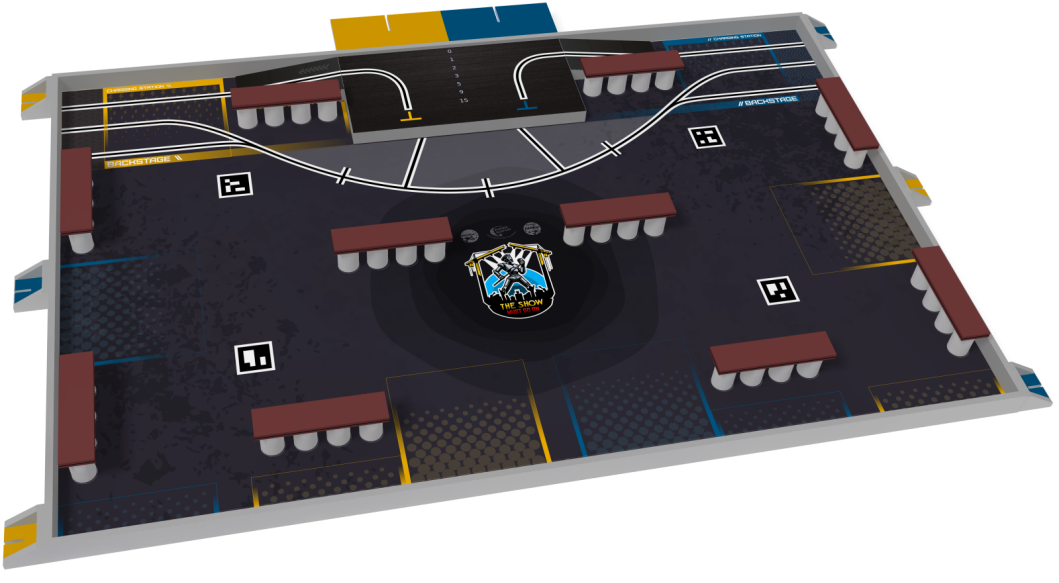
Gestern, am 27. Oktober, wurden die offiziellen Regeln für den diesjährigen Eurobot-Wettbewerb unter dem Motto „The Show Must Go On“ veröffentlich. Welche spannenden Aufgaben es diese Saison zu lösen gibt und an welche Regeln wir uns bei der Entwicklung der Roboter halten müssen, erfahrt ihr in diesem Beitrag.
Das Hauptziel des Wettbewerbes ist es, innerhalb von 100s so viele Aufgaben auf dem Spielfeld zu erledigen, wie möglich. Für jede gemeisterte Aufgabe, erhält dein Team Punkte, welche am Ende eines Spiels zusammengezählt werden. Die Herausforderung: Es treten immer zwei Teams gleichzeitig gegeneinander an und alle Roboter fahren vollständig autonom. Das Team mit mehr Punkten am Ende des Spiels, gewinnt.
Dieses Jahr sind die beiden Teamfarben Blau und Gelb. Jedes Team kann wahlweise in einer seiner zugehörigen großen Zonen starten. Die kleineren Zonen am Rand des Spielfeldes sind reine Bauzonen.
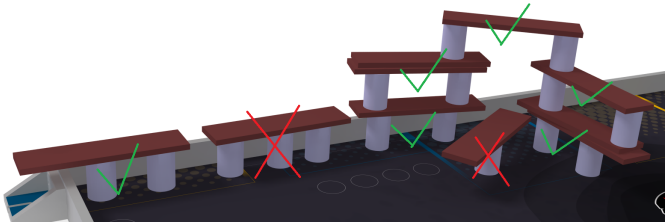
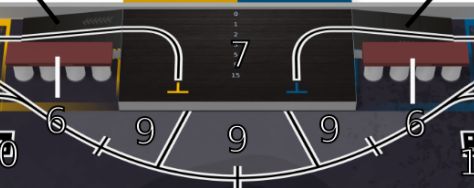
Unsere Roboter stehen auf der 2m*3m großen Spielplatte vor großen Herausforderungen. Die wohl schwierigste Aufgabe wird es sein aus den auf dem Spielfeld verteilten Dosen und Holzbrettern Tribunen aufzubauen. Dabei können aus jeder Materialeinheit, welche aus 4 Dosen und zwei Brettern besteht, eine zweistufige Tribüne gebaut werden. Noch mehr Punkte gibt es jedoch, wenn der Roboter noch eine weitere Etage einer anderen Materialeinheit oben draufsetzt.
Die Tribünen bringen deinem Team jedoch nur Punkte, wenn die äußersten beiden Säulen innerhalb einer Bau- oder Startzone deines Teams stehen.
Eine weitere Aufgabe ist es, ein eigen erstelltes Banner auf der Spielfläche zu befestigen, um Werbung für die Show auf der Bühne zu machen.
Zusätzlich können wir weitere Punkte verdienen, wenn unser Roboter am Ende des Spiels in seiner Endzone neben der Bühne ist und seine erreichte Punktzahl richtig einschätzt.
Wie letztes Jahr gibt es jedoch noch weitere kleine Aufgaben für unsere SIMAs (Small Independant Mobile Actuator). Diese dürfen jedoch erst ab der 85ten Sekunde angefangen werden: Einer der SIMAs wird am Anfang des Matches als „Superstar“ auserkoren. Der Superstar hat das Ziel über die Rampe auf die Bühne zu fahren und dort so weit möglich an die vordere Kante zu gelangen ohne herunterzufallen.
Zeitgleich versuchen die anderen kleinen Roboter in alle der drei Bereiche vor die Bühne zu gelangen, um ihren „Superstar“ aus allen Winkeln anzufeuern.
Mit dem neuen Semester startet für die TURAG auch eine neue Eurobot-Wettbewerb-Saison. Unter dem Motto „The Show Must Go On“ werden unsere Roboter unter Beweis stellen müssen, dass sie als Superstars Talent auf der großen Bühne haben.
Auch dieses Jahr müssen verschiedene, knifflige Aufgaben gelöst werden. Mit der Veröffentlichung des finalen Regelwerks am Sonntag den 27. Oktober, folgen dazu auch hier weitere Details.
Wir sind auf die neuen Herausforderungen gespannt und werden uns die beste Mühe geben, innerhalb der nächsten 6 Monate wieder tolle Roboter zu entwickeln.
Vor Allem freuen wir uns, dass in Mai 2025 der Deutsche Eurobot Wettbewerb hier in Dresden stattfindet. Wir haben bereits coole Events geplant und freuen uns als Gastgeber auf alle teilnehmenden Teams und interressierte Zuschauer.

 Konstruktion einer möglichst kompakten gefederten Kugelrolle.
Konstruktion einer möglichst kompakten gefederten Kugelrolle.