Gestern, am 27. Oktober, wurden die offiziellen Regeln für den diesjährigen Eurobot-Wettbewerb unter dem Motto „The Show Must Go On“ veröffentlich. Welche spannenden Aufgaben es diese Saison zu lösen gibt und an welche Regeln wir uns bei der Entwicklung der Roboter halten müssen, erfahrt ihr in diesem Beitrag.
Das Hauptziel des Wettbewerbes ist es, innerhalb von 100s so viele Aufgaben auf dem Spielfeld zu erledigen, wie möglich. Für jede gemeisterte Aufgabe, erhält dein Team Punkte, welche am Ende eines Spiels zusammengezählt werden. Die Herausforderung: Es treten immer zwei Teams gleichzeitig gegeneinander an und alle Roboter fahren vollständig autonom. Das Team mit mehr Punkten am Ende des Spiels, gewinnt.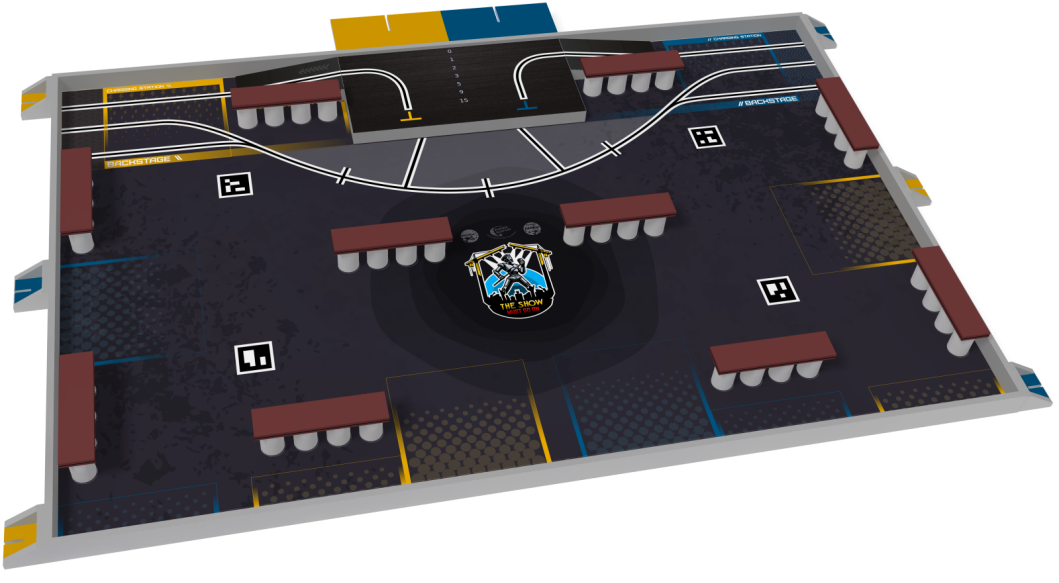
Dieses Jahr sind die beiden Teamfarben Blau und Gelb. Jedes Team kann wahlweise in einer seiner zugehörigen großen Zonen starten. Die kleineren Zonen am Rand des Spielfeldes sind reine Bauzonen.
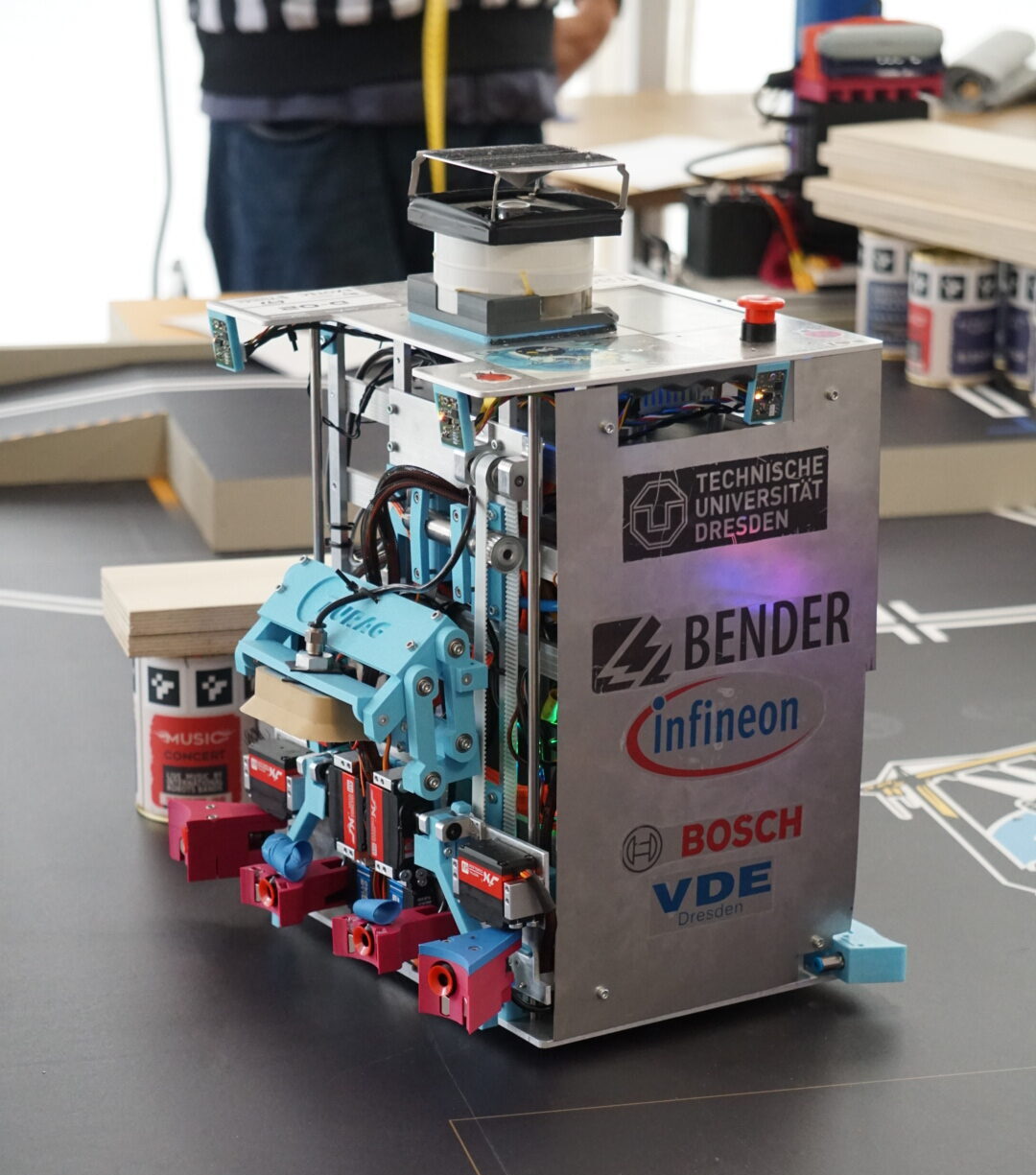
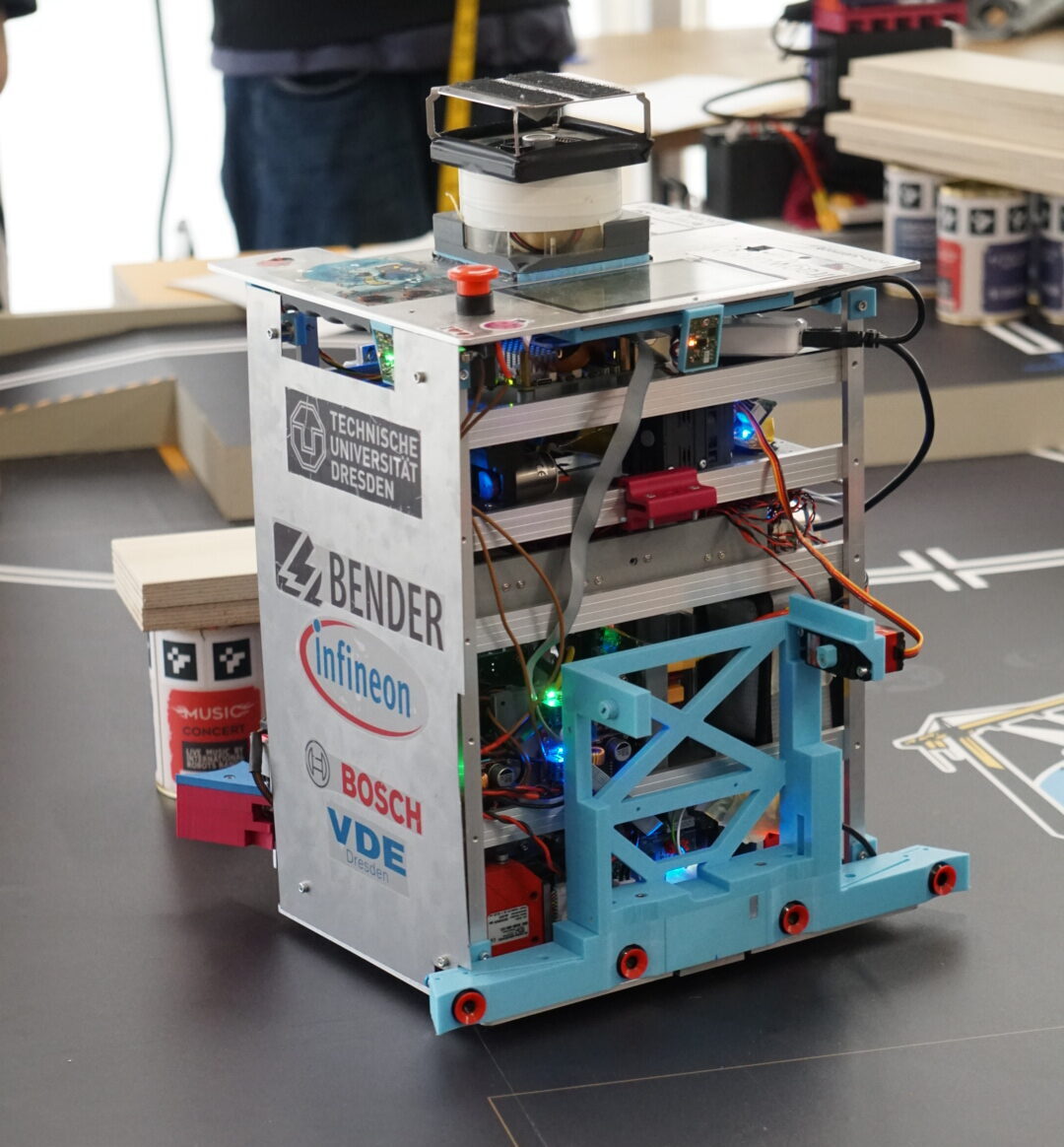
Unsere Roboter stehen auf der 2m*3m großen Spielplatte vor großen Herausforderungen. Die wohl schwierigste Aufgabe wird es sein aus den auf dem Spielfeld verteilten Dosen und Holzbrettern Tribunen aufzubauen. Dabei können aus jeder Materialeinheit, welche aus 4 Dosen und zwei Brettern besteht, eine zweistufige Tribüne gebaut werden. Noch mehr Punkte gibt es jedoch, wenn der Roboter noch eine weitere Etage einer anderen Materialeinheit oben draufsetzt.
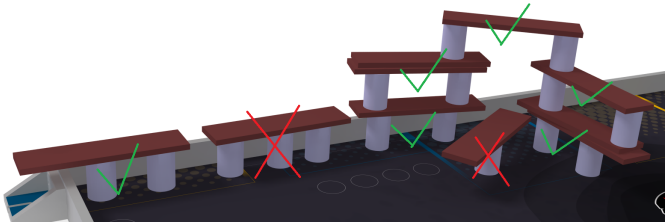
Die Tribünen bringen deinem Team jedoch nur Punkte, wenn die äußersten beiden Säulen innerhalb einer Bau- oder Startzone deines Teams stehen.
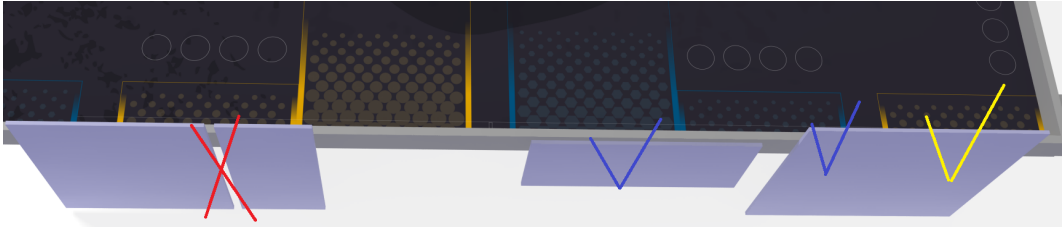
Eine weitere Aufgabe ist es, ein eigen erstelltes Banner auf der Spielfläche zu befestigen, um Werbung für die Show auf der Bühne zu machen.
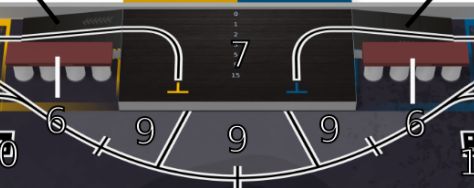
Zusätzlich können wir weitere Punkte verdienen, wenn unser Roboter am Ende des Spiels in seiner Endzone neben der Bühne ist und seine erreichte Punktzahl richtig einschätzt.
Wie letztes Jahr gibt es jedoch noch weitere kleine Aufgaben für unsere SIMAs (Small Independant Mobile Actuator). Diese dürfen jedoch erst ab der 85ten Sekunde angefangen werden: Einer der SIMAs wird am Anfang des Matches als „Superstar“ auserkoren. Der Superstar hat das Ziel über die Rampe auf die Bühne zu fahren und dort so weit möglich an die vordere Kante zu gelangen ohne herunterzufallen.
Zeitgleich versuchen die anderen kleinen Roboter in alle der drei Bereiche vor die Bühne zu gelangen, um ihren „Superstar“ aus allen Winkeln anzufeuern.