Es soll ein System zum Lokalisieren von ArUco Markern aufgebaut werden.
Zusammenfassung
In den neusten Eurobotregeln wurde ein neues System zur Objekterkennung eingeführt: ArUco Marker [1]. Diese können benutzt werden um die Position und Orientierung von Spielelementen herauszufinden oder sogar Gegner zu erkennen. Daher soll ein wiederverwendbares System zum Erkennen und zur Positionserfassung dieser Marker implementiert werden. Im Roboter kann dazu einen Webcam an den Hauptrechner angeschlossen werden, deren Bilder in einem ROS-Node [2] ausgewertet werden sollen.
Es ist nach Regelwerk außerdem zulässig ein zusätzliches Erkennungssystem über dem Spielfeld zu montieren. Dafür müsste ein Haltesystem konstruiert und geeignete Hardware zur Bildverarbeitung und Kommunikation (z.B. RapsberryPi) ausgewählt werden.
Aufgaben
Einarbeitung in ArUco und geeignete Bibliotheken
Implementierung eines Systems mit Kamera im Roboter
zusätzlich: Aufbau eines zentralen Erkkenungssystems
Diesen Montag wurden wir vom dresdner Team der National Instruments Corp (NI) herzlich in Empfang genommen. Nach einer ersten Office Tour und Einführung in die Forschungs- und Produktbereiche des Unternehmens wurden uns mehrere sehr spannende Demos erläutert. So konnten wir an Hand eines von NIs entwickelten hochwertigen digitalen Radios den Einfluss eines Handys auf die W-Lan und LTE Frequenzbänder beobachten und die mögliche Zukunft der Vermessung und Prüfung gerichteter Antennen live miterleben. Zusätzlich ermöglichte uns das Gespräch mit Chief Engineer Jan Schirok einen guten Einblick in den typischen Projekt- bzw. Arbeitsflow eines großen Unternehmen. Vielen Dank an NI für die Einladung und die Unterstüzung unseres Vereins. Wir freuen uns auf eine lange Partnerschaft.
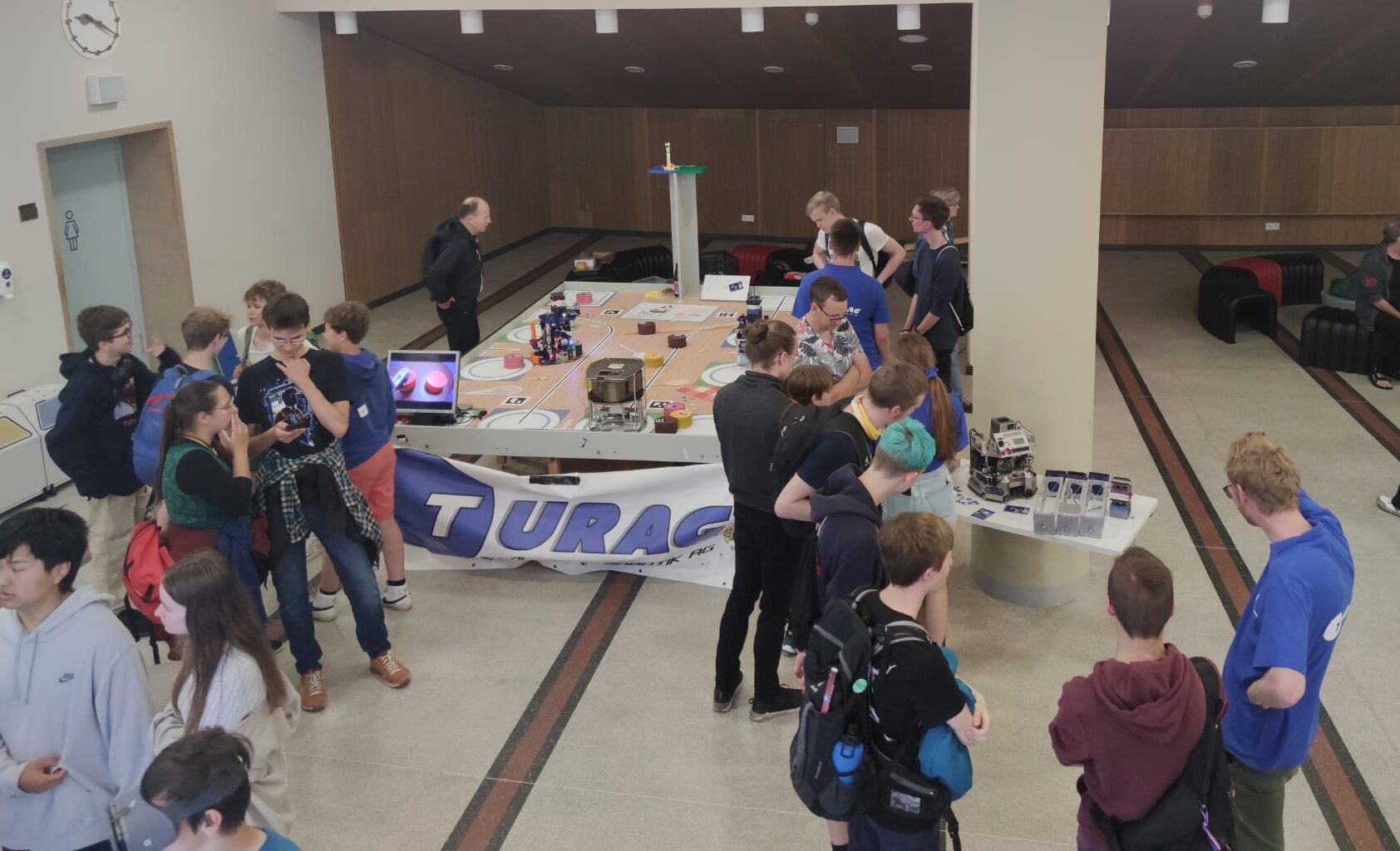
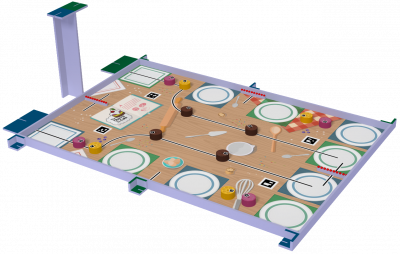
Auch zum 20. Jubiläum der Langen Nacht der Wissenschaften hier in Dresden hat die TURAG Besuchern einen Einblick in die Ingenieurswelt gegeben. Unter dem Motto „Robotik Hautnah“ haben wir es geschafft viele von Jung bis Alt für die autonome und mobile Robotik zu begeistern. Besonders viel Spaß bereitete unsere kleine Demo: Zuschauer konnten auf dem gesamten Spielfeld Schaumstoffkuchen verteilen, welche unser fleißiger Roboter mit Hilfer einer Kamera lokalisiert und dann nacheinander auf seinen eigenen Tellern platziert hat. Zusätzlich konnten die Kuchen auch während des gesamten Prozesses wieder in die Mitte geschoben werden. So war unser kleiner Helfer für bis zu 15 Minuten ununterbrochen und vollkommen selbständig aktiv. Wir bedanken uns bei allen, die bei uns vorbei geschaut haben und freuen uns darauf, auch nächstes Jahr wieder mit interessanten Robotern begeistern zu dürfen.
Endlich! Nach 4 Jahren geht es für die TURAG endlich wieder auf die Straßen nach Frankreich.
Nach viel Planung, letzten Nachtschichten zur Roboterverbesserung und einigen Anfangsschwierigkeiten ging es für 10 von uns 17:00 Uhr in Dresden los.
Stärkung auf der Reise
Da es für viele von uns zuvor noch zu Univeranstaltungen ging, wurde hauptsächlich geschlafen oder Musik gehört. Einen Zwischenstopp haben wir traditionell wieder an der Abfahrt Ramstein-Miesenstein zum Burger essen gemacht.
Mittwoch 17. Mai:
8:00 Uhr haben wir schließlich den Parkplatz neben der Veranstaltungshalle in La Roche sur-Yon erreicht. Bei strahlendem Sonnenschein wurden die Campingstühle ausgepackt und im naheliegenden Einkaufsladen ein kleines Frühstück besorgt. Auch die Schlafplätze im nun fast menschenleeren Auto wurden von manchen Mitfahrern nochmal ausgiebig getestet.
Nachdem wir 11:00 Uhr schließlich merkten, dass schon eine Schlange zur Anmeldung entstanden ist, haben wir uns ebenfalls dazugestellt und konnten kurz darauf unseren Stand vor Ort einrichten.
TURAG Teamstand
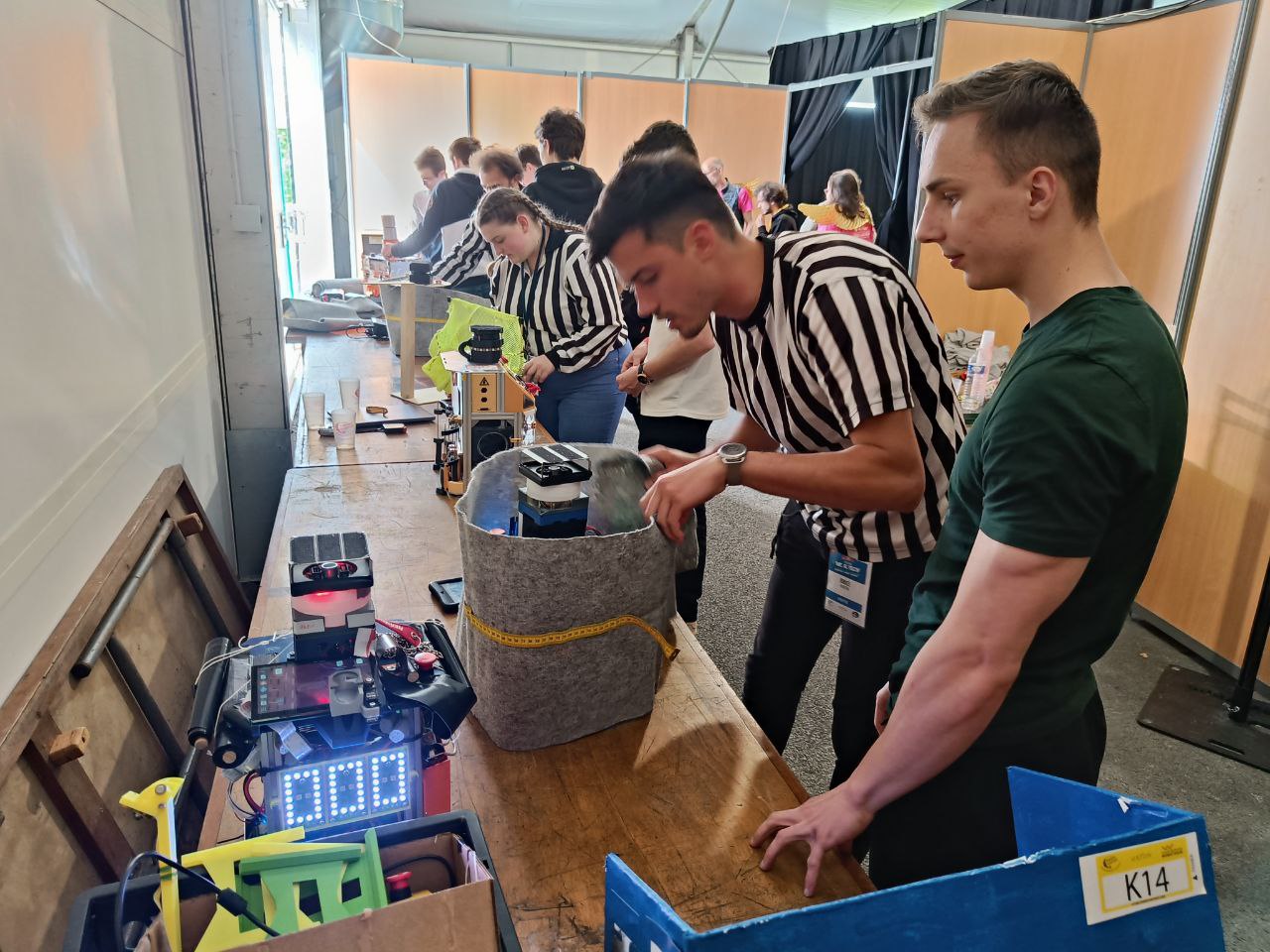
Nachdem wir uns mit französischem Gebäck für das Mittagessen eingedeckt und den uns altbekannten Teams hallo gesagt hatten, ging es 16:00 Uhr auch für die TURAG zur Homologation, welche wir ohne Probleme hinter uns gebracht haben.
Statische Homologation
Nach einigen Tests und vielen Gesprächen ging es an diesem Abend für die meisten schon direkt nach dem Abendessen in die Unterkunft, um den eher leichten Schlaf der letzten Nacht wieder ausgleichen zu können. Auch für die letzten ging es 22:30 Uhr schließlich in die Unterkunft, nachdem bei einem befreundeten Team noch Last-Minute-Projekte auf dem 3D Drucker angeworfen wurden.
Donnerstag 18. Mai
Heute standen für uns 2 Spiele sowie der Test unseres nächtlichen 3D Drucks auf dem Plan, wodurch es für uns schon 8:00 Uhr zum Wettbewerb ging.
Statt wie erwartet gegen 9:00 Uhr, begann unser erstes Spiel erst 11:30 Uhr, wodurch wir vorher mit unseren Turexen die Veranstaltungshallen unsicher machen konnten und erste Kontakte zu den ausländischen Teams geknüpft haben. Die TURAG hat ebenfalls (natürlich mit Erlaubnis der einzelnen Teams) angefangen ihre Sticker auf einigen Bots oder Baskets zu verteilen. Mit geschultem Auge, ist es möglich öfter einen TURAG Sticker in den folgenden Livestreams erspähen.
TURAG x Turex
Unser erstes Spiel des Wettbewerbes war gegen das Team +381 aus Serbien (TURAG vs. +381). Dieses lief leider nicht so gut wie erhofft. Trotzdem haben wir es mit 27:0 Punkten gewinnen können und wurden dabei sowohl von Team Auto(wie im Livestream zu hören ist) und den Turexen kräftig angefeuert.
Erstes Match vs. +381
Das zweite Spiel des Tages fand erst 17:30 Uhr statt. Trotzdem wurde die Zeit natürlich nicht untätig, sondern mit dem Beheben der Probleme, die in der ersten Runde aufgekommen sind, zugebracht. Dieses lief dann wesentlich besser und mit 62 zu 38 Punkten konnten wir uns gegen das Team Red Wire aus Spanien durchsetzen. (TURAG vs. Red Wire)
TURAG vs. Red Wire
Perfekt lief diese Runde jedoch ebenfalls nicht, da bei beiden Teams der Not-Aus betätigt werden musste. Das hieß in diesem Jahr jedoch nur 30 Punkte Abzug statt, wie in den letzten Jahren, 0 Punkte.
Was dies für uns jedoch auch hieß: es muss weitere Botfixes geben! Und so kam es doch dazu, dass auch in Frankreich mal wieder eine uns altbekannte Nachtschicht geschoben werden musste. Dadurch hatten wir jedoch den Vorteil, dass die Platten größtenteils frei waren und wir ausgiebig testen konnten.
Hotfix Nachtschicht
Freitag 19. Mai
Leider nimmt der Wettbewerb keine Rücksicht auf den Schlafmangel der TURAG und so mussten wir auch an diesem Tag 8:30 Uhr vor Ort sein, da wir ab 9:00 Uhr ein Spiel haben könnten. Notwendig wäre das frühe Aufstehen jedoch nicht gewesen, da wir erst 13 Uhr an den Platten standen. Die Zeit dazwischen wurde nochmal genutzt, um sich mit den anderen Teams zu unterhalten und Ideen auszutauschen. Auch der ein oder andere Sticker wurde wieder verklebt. Viel getestet und verbessert wurde jedoch angesichts der wenigen Stunden Schlaf nicht.
Die folgende Runde gegen CyberTech aus Rumänien konnten wir durch Probleme bei der Gegnererkennung nur mit einem Bot starten. Dieser blieb leider auch nicht Problemlos und die Sensoren konnten die braunen Kuchen nicht erkennen. Trotzdem war es mit 70:36 Punkten bisher unsere beste Runde. (TURAG vs. CyberTech)
In der vierten Runde hat sich unser Erfolg leider nicht fortgesetzt. Nachdem zuerst die Fahreinheit unseres einen Roboters auf Grund von Verbindungsproblemen nicht startete, verschob unser Gegner auch noch eine Vielzahl von Kuchen, welche wir einsammeln wollten. So beendeten wir Runde 4 mit 34:46. (TURAG vs. Dummy)
Zur Abwechslung vom Stress und der Arbeit des Wettbewerbes haben wir uns den späten Nachmittag frei genommen, um zur Atlantikküste zu fahren. Dort konnten wir bei Beach-Volleyball und einer minimalen Badesession zumindest für einen kurzen Zeitraum abschalten.
TURAG am StrandTUREX mit Schiedsrichter beim Coupe Off
Lange konnten wir jedoch nicht bleiben, da wir sonst zu spät zum Grillen und Coupe-Off da gewesen wären. Dabei können die Teams nochmal zeigen, was ihre Bots so drauf haben – und zwar nicht auf der Spielfläche. Welcher Bot kann das schönste Bild malen? Welcher Bot kann sich am schnellsten drehen? Alle haben auf ihre Art versucht für Stimmung zu sorgen. Ein Team hat eine Bierflasche motorisiert, ein anderes ist mit einer bunt leuchtenden Plattform rumgefahren. Auch hier haben wir versucht das ein oder andere Lächeln auf die Gesichter bringen zu können, indem wir zum Beispiel unseren leider nie im Bot zum Einsatz kommenden Kirschen-Schießmechanismus ausgebaut und Kirschen durch die Menge geschossen haben. Auch unsere Turexe kamen natürlich wieder zum Einsatz.
Samstag 20. Mai
So langsam neigt sich der ganze Wettbewerb dem Ende zu. In der 5. und letzten Vorrunde konnten wir nochmal zeigen, was wir eigentlich können. So haben wir Team GROMEP aus Spanien mit 94:0 Punkten schlagen können und uns damit als 8. Platz für die Finalrunden qualifiziert. (TURAG vs. GROMEP – falsche Teambeschriftung im Livestream)
TURAG vs. GROMEP
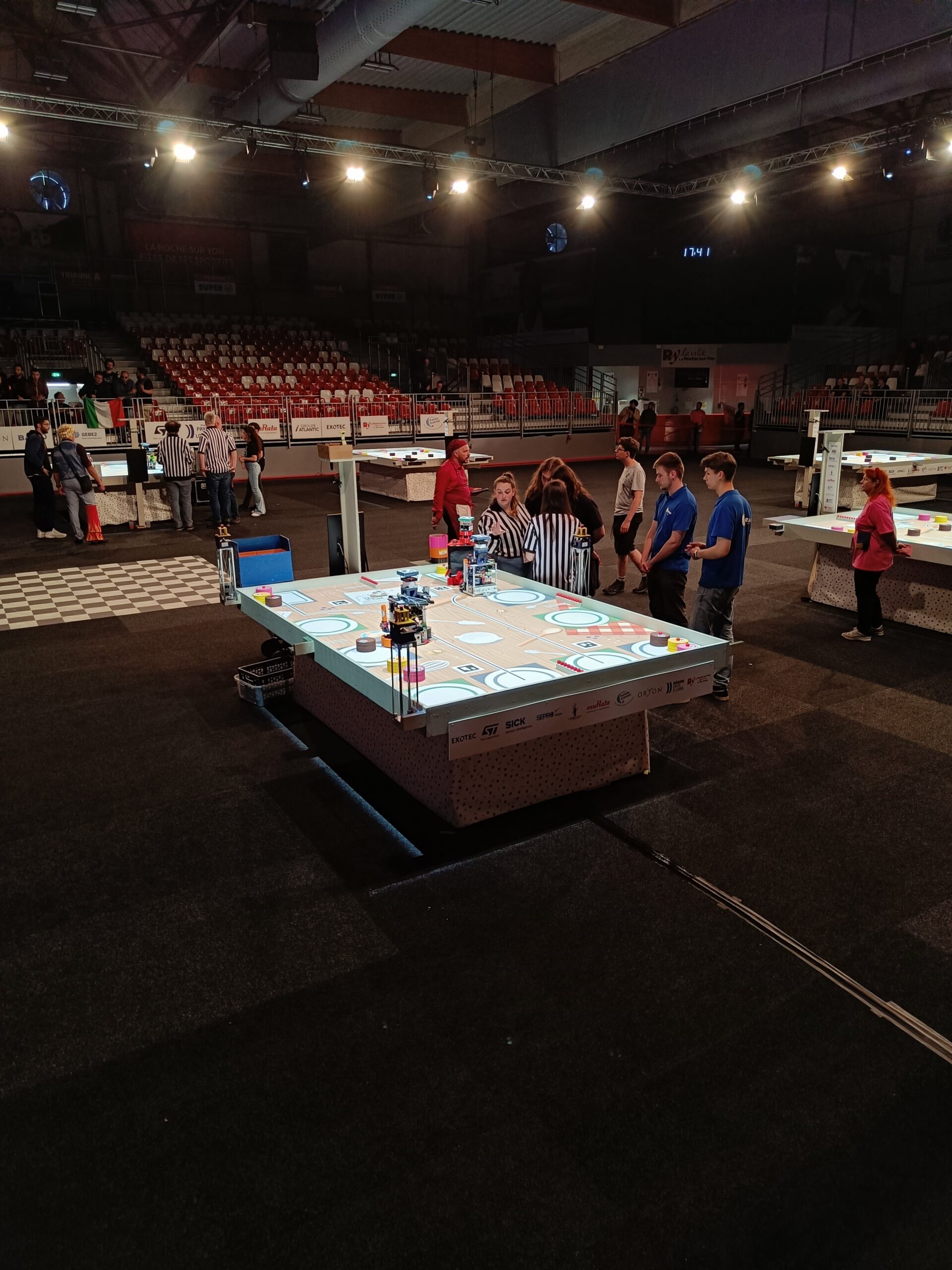
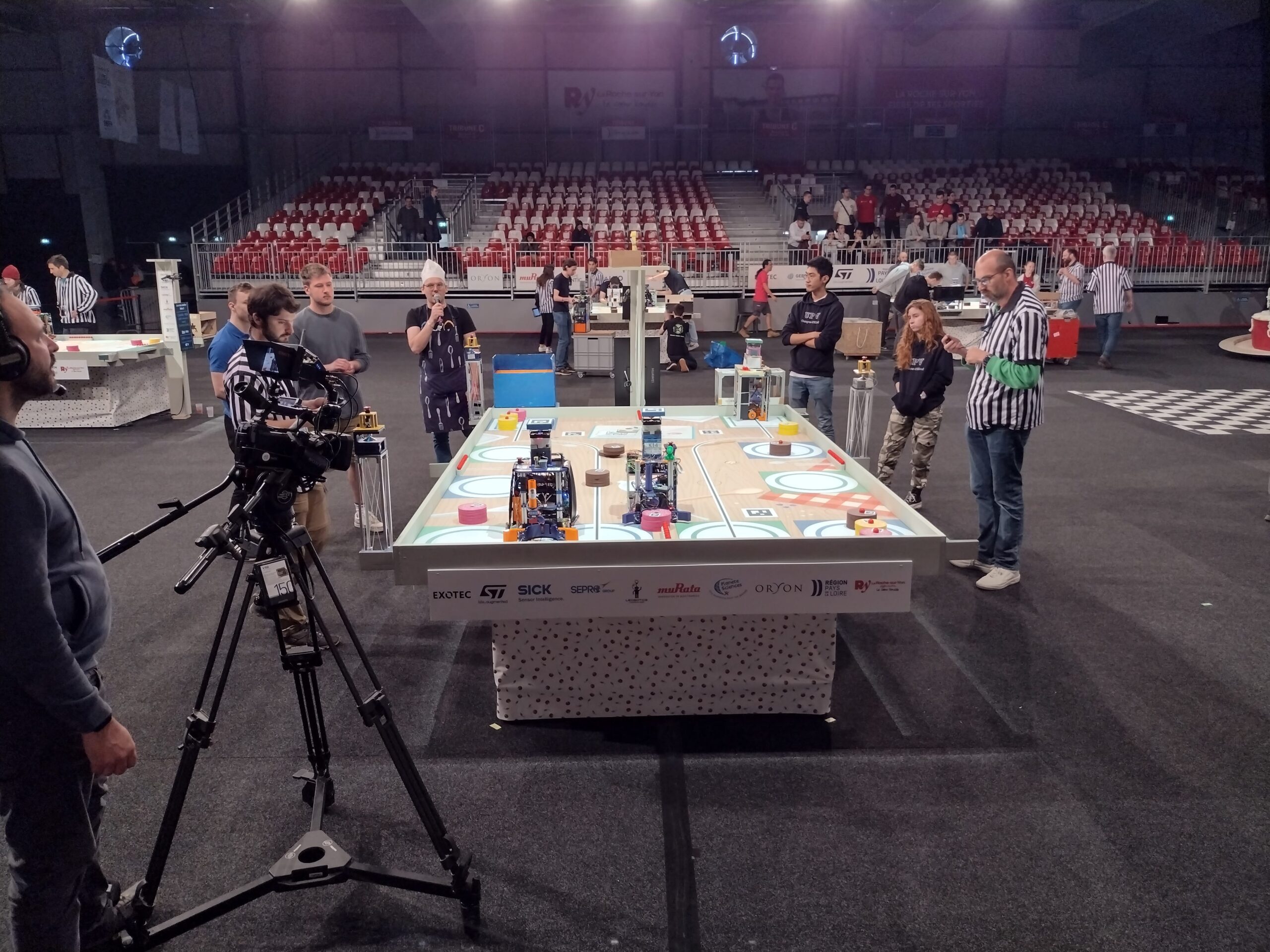
Bevor es jedoch an die Viertelfinalrunden ging, mussten sich Platz 6, 7 und 8 der Internationalen Teams gegen Platz 3, 2 und 1 des Französischen Nationalentscheids durchsetzen. Dies bedeutet, dass wir uns gegen den ersten Platz der Franzosen – Team RCVA – beweisen mussten. Von Anfang an war klar, dass das nicht einfach wird. Mit einer neuen Strategie versuchten wir den RCVA zu überraschen. Dies gelang uns anscheinend zu gut: Das französische Team rammte beide unserer Roboter und setzte sie somit außer Gefecht. Als Konsequenz wurde bei einem französischen Bot der Notaus gedrückt. Voller Spannung erwarteten wir das Ergebnis der Schiedsrichter… 23:24… für den RCVA. (TURAG vs. RCVA)
Finalrunde gegen RCVA
So konnten wir die folgenden Finalrunden leider nur noch von der Tribüne aus beobachten und unser Bestes dabei geben, die anderen Teams anzufeuern.
Auch wenn wir uns natürlich über ein besseres Ergebnis gefreut hätten, sind wir mit dem 11. Platz bei 30 teilnehmenden Teams sehr zufrieden. Wir konnten sehr viel für die kommende Saison dazulernen- sowohl wo Verbesserungsbedarf besteht, aber auch wo sich unsere Methoden bewährt haben. Mit viel Motivation warten wir schon gespannt auf die Erscheinung des Regelwerkes zur nächsten Saison, die unter dem Motto „Farming Mars“ stehen soll. Wir sind uns sicher, dass wir mit unseren neuen Erkenntnissen beim Eurobot 2024 noch bessere Ergebnisse einfahren werden.
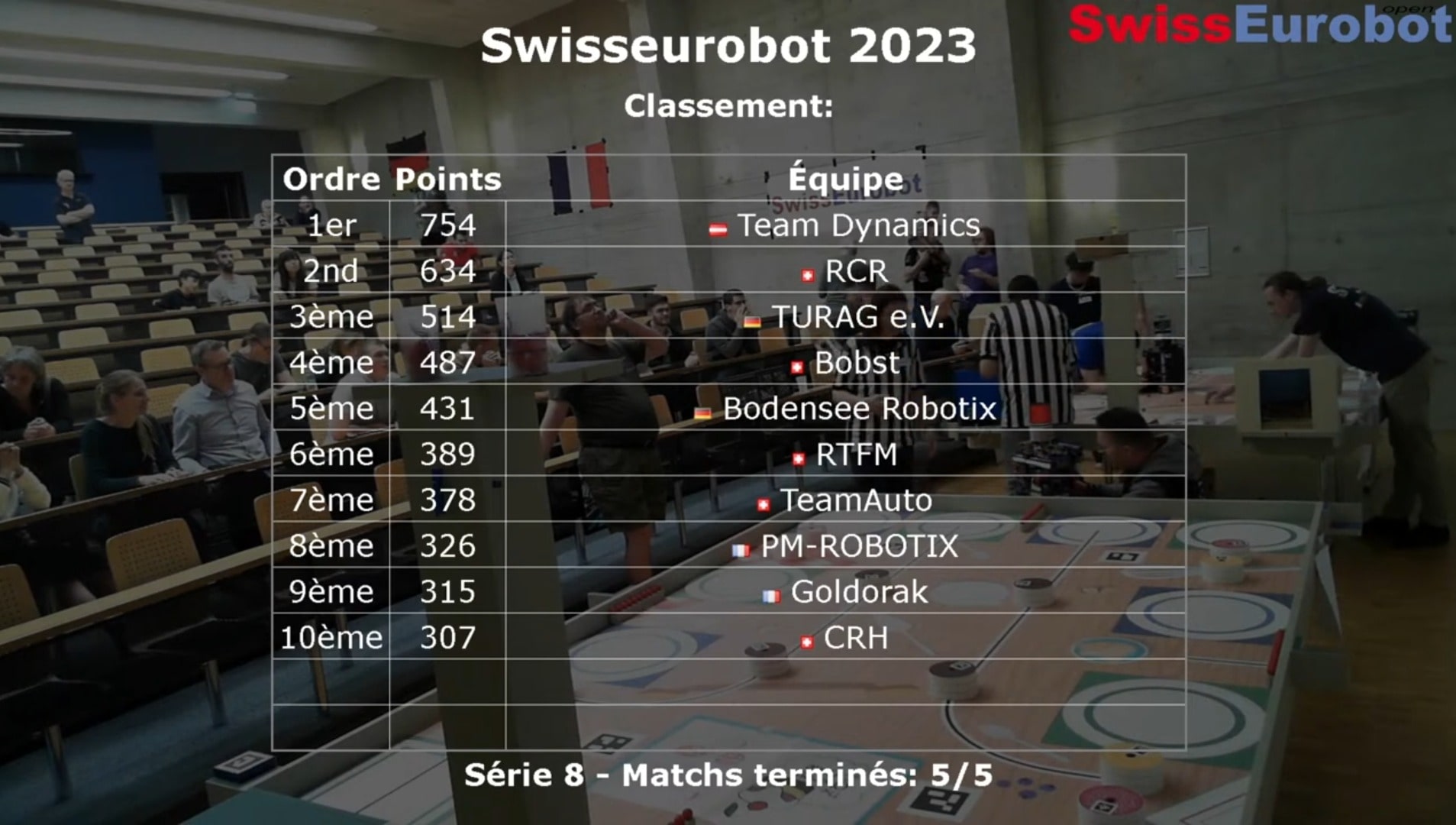
Nach viel zu langer Zeit ging es endlich wieder ins Ausland! Am Wochenende des 6./7. Mais begab sich die TURAG auf eine Reise in die Berge zum Swiss Eurobot Wettbewerb. Dieser bietet für die schweizer Teams, wie für die deutschen Teams der deutsche Eurobot, die Chance zur Qualifikation zum internationalen Wettbewerb in Frankreich. Als Gastteam war es das Ziel, so viele Erfahrungen vor dem internationalen Eurobot zu sammeln wie möglich und unseren Roboter weiterzuentwickeln.
Swiss Eurobot Banner
Austausch mit Team RCR
Match-Vorbereitung
Post Match Interview
Trotz anfänglicher Bedenken stellte sich heraus, dass unser einer, sehr zuverlässiger Roboter, mit den überwiegend zwei Bots der anderen Teams gut mithalten konnte.
Mit Konsistenz schafften wir es damit sehr erfolgreich durch die Gruppenphase und erreichten den 3. Platz! Leider reichte unsere konsistente Strategie nicht aus, um sich auch in den Finalrunden gut durchzusetzen. Am wichtigsten ist jedoch das neue Wissen und die Erfahrungen, die wir als junges Team mit in den internationalen Wettbewerb nehmen können. Mit unserem zweiten Roboter nahe der Inbetriebnahme besteht große Hoffnung auf viel Spaß und Erfolg in Frankreich!
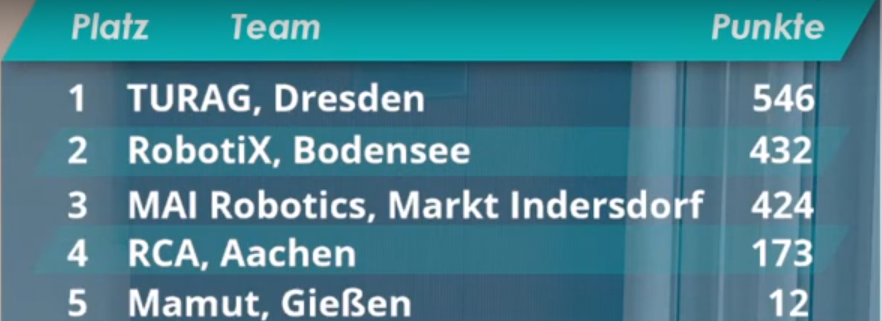
Wir haben es geschafft! Die TURAG hat den ersten Platz beim diesjährigen deutschen Eurobot erreicht!
Nach einem hart umkämpften Wettbewerb konnte sich die TURAG gegen die vier anderen deutschen Robotik-Teams durchsetzen. Nachdem sich die Teams in der Gruppenphase um möglichst viele Punkte bemühten, schafften wir es mit deutlichem Abstand als Erster in die KO-Runde einzuziehen.
Punktestand vor dem Finale
Nach der Überwindung kleiner Anlaufschwierigkeiten in den KO-Runden und mehrerer knapper Siege, konnte sich die TURAG im Finale gegen MAI Robotics erfolgreich durchsetzen und sich damit für den internationalen Eurobot-Wettbewerb in Frankreich qualifizieren. Ebenso qualifizieren konnten sich das Schülerteam MAI aus Markt Indersdorf und der RCA aus Aachen. RobotiX vom Bodensee erreichte den vierten und Team Mamut aus Gießen den fünften Platz. (Livestream: Tag 1 ,Tag 2)
Wir bedanken uns bei allen Teams für die Teilnahme am deutschen Wettbewerb hier in Dresden und freuen uns darauf, viele von euch bald in Frankreich wieder zu sehen!
Zuletzt ein großes Dankeschön an alle Unterstützer:innen, die es uns Studis der TURAG ermöglichen, ihre technischen Ideen zu verwirklichen und Wettbewerbe wie diesen zu veranstalten.
Bald ist es soweit! Am Wochenende des 22.4 & 23.4. findet bei uns in Dresden der deutsche Eurobot Wettbewerb statt. Fünf deutsche und ein internationales Team ringen in Zusammenarbeit mit ihren Robotern, um die Qualifikation zum internationalen Wettbewerb in Frankreich. Kommt vorbei und schaut euch die Wettkämpfe live oder im Livestream an. Das Finale findet voraussichtlich am Sonntag Nachmittag statt. Alle Spiele werden im Schönfeldhörsaal (BAR/SCHÖN/E) ausgetragen. Die Regeln und weitere Informationen zum Wettbewerb findet ihr hier
Die TURAG freut sich über euren Support!
Schedule
This schedule will be kept up to date if any changes occur. If you have any questions, feel free to reach out to kontakt@turag.de
Friday, April 21st
14.30 – …
Teams can store luggage at event area
18.30
Early Check-In for teams/ early Homologation (depending on availability of playing field)
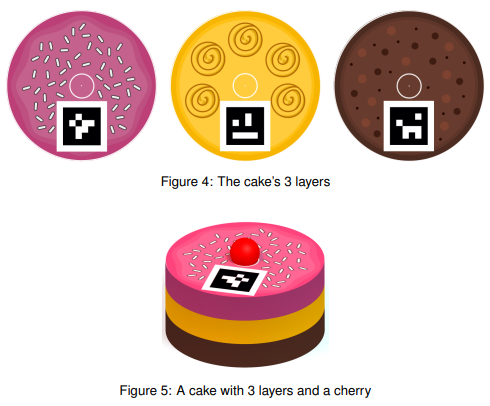
Bereits im Oktober hat für uns parallel mit der Veröffentlichung der Wettbewerbsregeln die neue Saison begonnen. Das Thema ist durch verschiedene Backaufgaben motiviert und lautet “The Cherry On The Cake”. Dabei geht es um Problemstellungen der Bild- beziehungsweise Objekterkennung, Manipulation und den Transport von Spielelementen, sowie darum das „Verkleiden“ des Roboters vorzunehmen.
Die Hauptaufgabe dieses Jahr besteht daraus, die auf dem Spielfeld verteilten Kuchenschichtstapel einzusammeln, zu sortieren und danach mit Hilfe eines vorgegebenen „magischen Rezeptes“ zu einer Torte zusammenzusetzen.
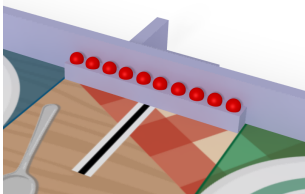
Jedes Team darf am Anfang des Spiels bereits 10 Kirschen in den jeweiligen Robotern einlagern. Zusätzliche Kirschen können auf dem Spielfeld eingesammelt und in Körben abgelegt werden.
Dieser Wettbewerb ist aus zwei Gründen sehr besonders: Es gibt nicht nur zum ersten Mal mehrere Startpositionen, welche bis zum letzten Moment geändert werden können, sondern es ist ebenfalls erlaubt Kuchen des Gegners zu stehlen.
Auf in eine neue Saison! Anfang Oktober 2022 wurden die Regeln für den Eurobot-Wettbewerb 2023 unter dem Motto „The Cherry on the Cake“ vorgestellt. In Einklang mit unseren Robotern werden wir uns verschiedenen Backaufgaben stellen und hoffentlich die ein oder andere leckere Torte zusammenzaubern.
Vor Kurzem hat uns TraceTronic, eine Firma, die automatisierte Testlösungen anbietet, besucht. Nach einer Tour durch unser Labor und fachlichen Gesprächen hat uns TraceTronic nun auch offiziell ihre Spende überreicht und unterstützt uns so bei zukünftigen Projekten. Dafür möchten wir uns herzlich bedanken!

 Es soll ein System zum Lokalisieren von ArUco Markern aufgebaut werden.
Es soll ein System zum Lokalisieren von ArUco Markern aufgebaut werden.