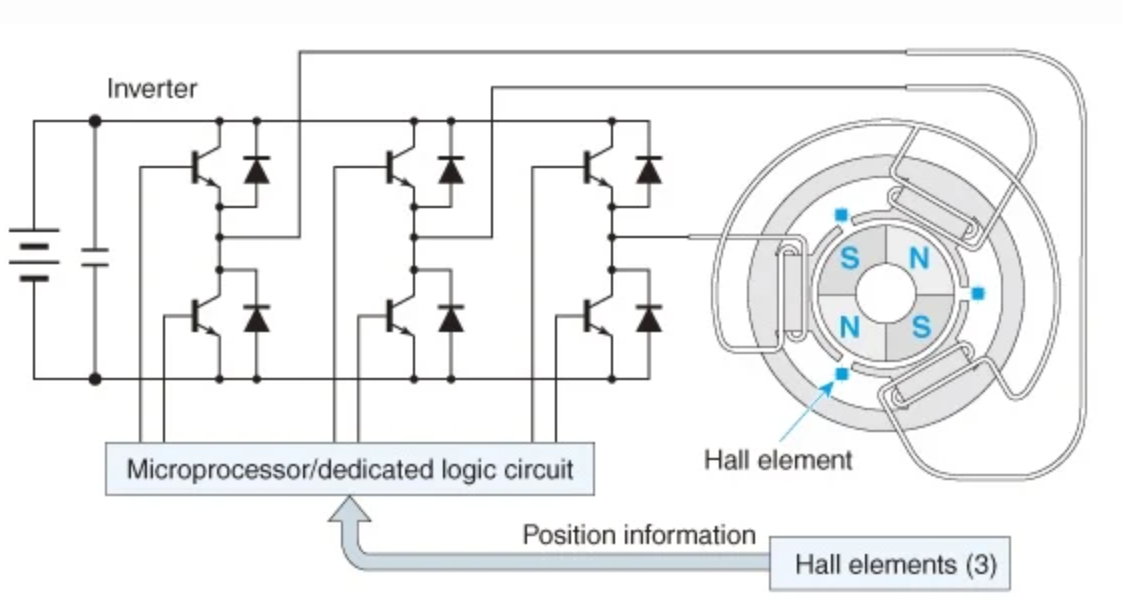
Wir benutzen viele verschiedenen Aktoren, um Aktionen mit unserem Roboter auszuführen. Aktuell haben wir selber Platinen und Software für die Ansteuerung von Servos und DC-Motoren entwickelt. Um in Zukunft noch mehr Optionen in der Aktorauswahl zu haben, würden wir gerne ein Treiber für Brushless DC Motoren (BLDC) entwickeln.
Dafür müssen folgende Teile entwickelt werden:
BLDC-Reglerplatine (z.B. mit STSPIN32 Mikrocontroller)
Software zur Ansteuerung und Regelung der Motoren (C++)
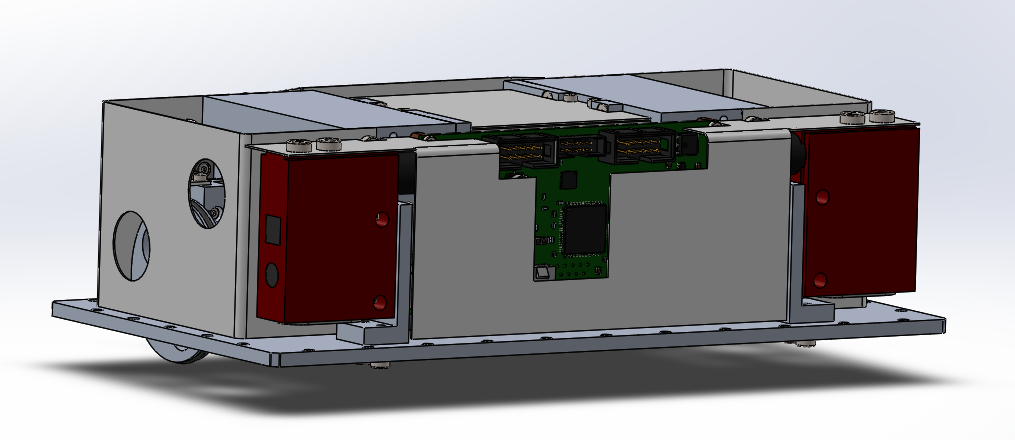
In der TURAG legen wir sehr viel Wert darauf, so viele Bestandteile unseres Roboters wie möglich selber zu entwickeln und dabei zu lernen. Aus diesem Grund haben wir eine komplett eigene Antriebseinheit entwickelt, welche in den Robotern der letzten Jahre stets zum Einsatz gekommen ist. Jetzt wollen wir jedoch aufbauend auf unseren Erfahrungen eine zweite Version gestalten.
Ziel ist es den Antrieb kleiner zu machen und mehr Flexibilität durch eine Katamaran-Bauweise (zwei getrennte Antriebsblöcke) zu schaffen.
Dafür müssen folgende Teile entwickelt werden (natürlich macht nicht einer alles):
BLDC-Reglerplatine (Hauptaufgabe, entweder STSPIN32 oder sowas wie TMC9660)
Hauptprozessorplatine (vergleichsweise simpel, im Prinzip ein STM32(H7) mit RS485-Interface)
Softwareanpassung des bisherigen Codes an einen externen Motortreiber
Antriebsblöcke mit eingebauter Odometrie
Dabei kannst du mit folgenden Tools arbeiten:
KiCad für das Platinendesign
C++ zur Programmierung
SolidWorks für die mechanische Konstruktion
Damit bietet das Projekt Teilaufgaben aus den Bereichen der mechanischen Konstruktion, dem Platinendesign und der Programmierung.
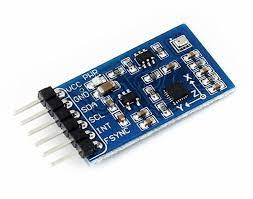
Für die Verbesserung unseres Gegnererkennungssystems würden wir gerne IMUs (Inertia Measurement Units), also Beschleunigungssensoren nutzen. Bisher basiert unsere Gegnererkennung ausschließlich auf Triangulation mit Ultraschall. Die zusätzlichen Informationen einer IMU auf den gegnerischen Robotern soll diese noch genauer machen.
Aufgaben
Erstes Testen verschiedener IMUs m.H. von Dev – Boards
Erstellen einer kompakten Platine zur Ansteuerung des Sensors + Kommunikation mit unserem Roboter
Unsere bisherige Spannungsversorgung für 12V, 6V und 5V beruht auf integrierten Schaltreglermodulen, die mit KFZ-Sicherungen abgesichert sind. Dieses System verbraucht relativ viel Platz, ist relativ unflexibel was verschiedene Spannungen angeht und in seiner Leistung durch die verwendeten Schaltreglermodule begrenzt.
Es gilt zu untersuchen, ob eine digitale Spannungs-Regelung und Überwachung auf Basis eines STM32(G4) diese Nachteile beseitigen kann.
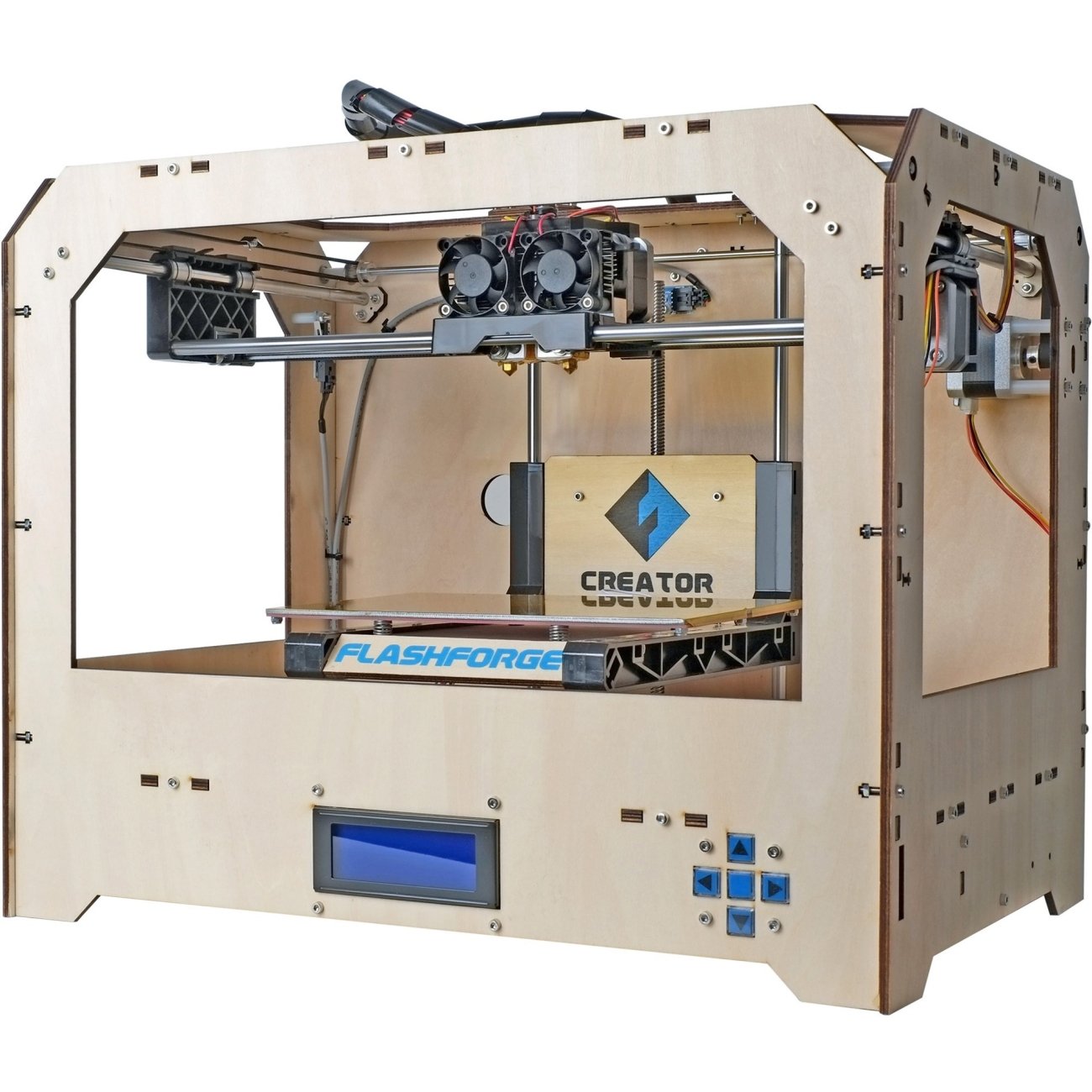
Neuaufbau unseres alten 3D-Druckers als „mobiler“ Drucker
Zusammenfassung
Unser alter 3D-Drucker Flashforge Creator Klon [1] ist seit mehreren Jahren aus dem aktiven Dienst entlassen. Da er sich dank seiner Bauform perfekt zwischen anderen Kisten verstauen lässt, wäre es aber gut ihn als „Reisedrucker“ für Wettbewerbe wieder einsatzbereit zu machen. Dazu müsste die Hardware gewartet und nach Bedarf teilweise erneuert werden. Auch softwareseitig sollte nach neuen Optionen für die stark veraltete Firmware geschaut werden, um den Workflow zu vereinfachen [2]. Zusätzliche hilfreiche Modifikationen sind denkbar und erwünscht. Ein ideales Einsteiger- und Bastelprojekt.
Aufgaben
Hardware überprüfen und warten
Recherche zu Druckersoftware und Workflows
mechanische Modifikationen für einfacheren Transport