
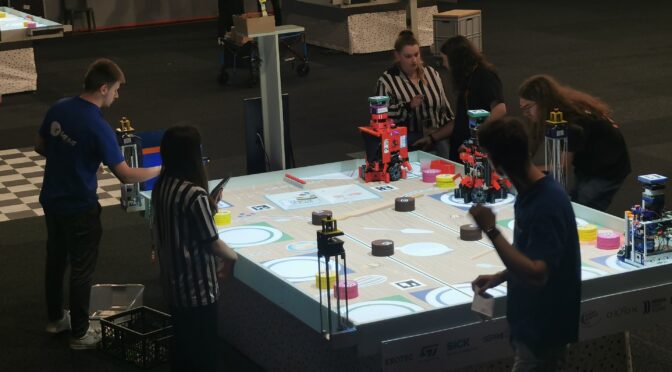

Am Wochenende des 19. – 21. Aprils war es wieder so weit – Nach 6 monatiger Entwicklungszeit dürfen die deutschen Teams das Können Ihrer Roboter unter Beweis stellen. Der Wettbewerb wurde dieses Jahr von Team Mammut in Gießen organisiert und es nahmen insgesamt sechs Teams aus ganz Deutschland teil: 2x Team MAI Robotics aus Markt Indersdorf, der Roboter Club Aachen, Bodensee RobotiX, Team Mammut und natürlich die TU Dresden Robotik AG. Das Ziel? Die Qualifikation für den internationalen Wettbewerb an der Westküste Frankreichs. Nur die top drei Teams aus jedem Land dürfen an diesem teilnehmen und sich gegen die Besten der Besten auf der großen Bühne beweisen.
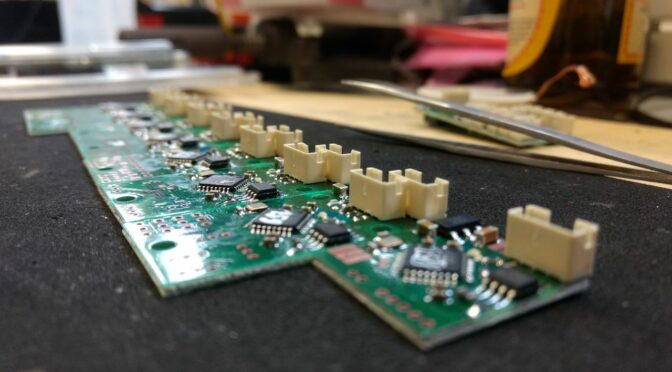
Für uns lief der Wettbewerb jedoch alles andere als geplant. Der Zusammenbau und die Inbetriebnahme unseres Roboters Marl°E stellten sich schwieriger und zeitintensiver heraus als anfänglich geplant. Zusätzlich haben wir durch kleine Unaufmerksamkeiten einige wesentliche Elemente unseres Roboters wie das Mainboard und die Antriebsplatine mehrfach reparieren/ fertigen und in Betrieb nehmen müssen. Dies führte letztlich dazu, dass wir noch bis Wettbewerb-Samstag 1 Uhr morgens die letzten Softwarekomponenten testeten bevor wir bei Regen und Dunkelheit nach Gießen aufbrachen.

Nachdem unsere letzten Tests am Vorabend erfolgreich waren, sind wir mit großer Zuversicht in den ersten Wettbewerbstag gestartet. Ein essentieller Aspekt für die Teilnahme am Wettbewerb ist die Homologation. Bei dieser wird überprüft, ob der Roboter alle Regeln einhalten und erfüllen kann. Die statische Homologation, also die Überprüfung von Umfang, Safety Features und erlaubten Lasern, lief einwandfrei. Bei der dynamischen Homologation traten jedoch auf einmal die ersten Probleme auf: Unser Roboter reagierte erst viel zu spät auf gegnerische Roboter und schubbste diese somit für kurze Zeiten vor sich weg, bevor er anhielt. Dies ist gegen die Regeln und damit nicht spielzulässig. Genau an dieser Problematik saßen wir am Abend zuvor und dachten eigentlich es gelöst zu haben. Damit konnten wir an den ersten Runden des Wettbewerbes nicht teilnehmen und verbrachten die Zeit mit der Reparatur der Gegnererkennung.
Wir fanden schnell heraus, dass die Kommunikation zwischen unseren Modulen nach der Gegnererkennung bis zu zwei Sekunden braucht. Bei unseren Top-Geschwindigkeiten von bis zu 2 m/s ist dies viel zu langsam. Was jedoch viel schwieriger zu finden war, ist die Ursache für dieses massive Problem. Mit vorranschreitender Zeit und immer größer werdenden Druck wurde es für uns jedoch nicht einfacher: Bei den ganzen Versuchen, die Kommunikationslatenz zu reduzieren, haben wir es geschafft die gesamte Software unseres Roboters lahmzulegen. Am Sonntag um 1 Uhr morgens ging schließlich nichts mehr. Somit wurde sich auf ein Rollback auf den Stand vor der Homologation entschieden, in der Hoffnung mit klareren Köpfen noch einmal die Problematik zu analysieren. Entgegen aller Erwartungen funktionierte dieser eigentlich sichere Stand jetzt jedoch auch nicht mehr. Wir probierten noch bis in den Sonntagmorgen, den Roboter wieder zum Bewegen zu bringen, waren dabei jedoch leider erfolglos.
Die TURAG konnte nicht an den Finalrunden teilnehmen und sich damit auch nicht für den internationalen Wettbewerb qualifizieren. Am meisten enttäuscht sind davon wohl wir selbst. Als Team haben wir über die letzten sechs Monate tausende Stunden Arbeit in Marl°E gesteckt und insbesondere die letzten Wochen alle an einem Strang gezogen, um einen beeindruckenden Roboter präsentieren zu können. Im Endeffekt zählt jedoch nur was zum Wettbewerb funktioniert.

Ein Miserfolg bringt jedoch nicht nur schlechtes mit sich. Dieses Jahr haben wir als Team eine sehr komplexe Aufgabe auf uns genommen, neue Sensorik und Elektronik entwickelt, feinmechanische Konstruktionen gefertigt und unsere Softwarestruktur vielfach erweitert. Jedes unserer Mitglieder hat dieses Jahr seine praktischen Skills stark vorangetrieben und wir sind stolz auf unseren Roboter Marl°E. Vor Allem sind wir motiviert aus unseren Fehlern dieses Jahr zu lernen und arbeiten bereits aktiv daran, dass solche Miserfolge nicht noch einmal passieren und die TURAG auch in der Zukunft wieder auf der internationalen Bühne steht.